
2018 Microchip Technology Inc. DS70005340A-page 1
HIGHLIGHTS
This section of the manual contains the following major topics:
1.0 Introduction ....................................................................................................................... 2
2.0 CAN FD Message Frames................................................................................................ 5
3.0 Control Registers .............................................................................................................. 9
4.0 Modes of Operation ........................................................................................................ 51
5.0 Configuration................................................................................................................... 57
6.0 Message Transmission ................................................................................................... 67
7.0 Transmit Event FIFO – TEF............................................................................................ 76
8.0 Message Filtering............................................................................................................81
9.0 Message Reception ........................................................................................................ 86
10.0 FIFO Behavior................................................................................................................. 92
11.0 Timestamping................................................................................................................103
12.0 Interrupts....................................................................................................................... 104
13.0 Error Handling................................................................................................................111
14.0 Related Application Notes............................................................................................. 113
15.0 Revision History ............................................................................................................114
CAN Flexible Data-Rate (FD) Protocol Module

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 2 2018 Microchip Technology Inc.
1.0 INTRODUCTION
CAN Flexible Data-Rate (FD) addresses the increasing demand for bandwidth on CAN buses.
The two major enhancements over CAN 2.0B consist of:
• Increased data field up to 64 data bytes (currently 8 bytes)
• Option to switch to faster bit rate after the arbitration field
Figure 1-1 shows the possible increase in net bit rate due to the higher Data Bit Rate (DBR) and
increased data bytes per frame (© Robert Bosch GmbH).
Figure 1-1: Net CAN FD Bit Rate
The CAN FD protocol is defined to allow CAN 2.0 messages and CAN FD messages to co-exist
on the same bus. This does not imply that non-CAN FD controllers can be mixed with CAN FD
controllers on the same bus. Non-CAN FD controllers will generate error frames while receiving
a CAN FD message.
1.1 Features
The CAN FD module has the following features:
General
• Nominal (Arbitration) Bit Rate up to 1 Mbps
• Data Bit Rate up to 8 Mbps
• CAN FD Controller modes:
- Mixed CAN 2.0B and CAN FD mode
- CAN 2.0B mode
• Conforms to ISO11898-1:2015
Message FIFOs
• 31 FIFOs Configurable as Transmit or Receive FIFOs
• One Transmit Queue (TXQ)
• Transmit Event FIFO (TEF) with 32-Bit Timestamp
Message Transmission
• Message Transmission Prioritization:
- Based on priority bit field and/or
- Message with lowest ID gets transmitted first using the TXQ
• Programmable Automatic Retransmission Attempts: Unlimited, 3 Attempts or Disabled
Frame ID: 11-Bit, Bit Rate Arbitration: 1 Mbit

2018 Microchip Technology Inc. DS70005340A-page 3
CAN FD Protocol Module
Message Reception
• 32 Flexible Filter and Mask Objects
• Each Object can be Configured to Filter either:
- Standard ID and first 18 data bits or
- Extended ID
• 32-Bit Timestamp
• The CAN FD Bit Stream Processor (BSP) implements the Medium Access Control of the
CAN FD protocol described in ISO11898-1:2015. It serializes and deserializes the bit
stream, encodes and decodes the CAN FD frames, manages the medium access,
Acknowledges frames, and detects and signals errors.
• The TX handler prioritizes the messages that are requested for transmission by the
transmit FIFOs. It uses the RAM interface to fetch the transmit data from RAM and provides
it to the BSP for transmission.
• The BSP provides received messages to the RX handler. The RX handler uses an
acceptance filter to filter the messages that shall be stored in the receive FIFOs. It uses the
RAM interface to store received data into RAM.
• Each FIFO can be configured either as a transmit or receive FIFO. The FIFO control keeps
track of the FIFO head and tail, and calculates the user address. In a TX FIFO, the user
address points to the address in RAM where the data for the next transmit message is
stored. In an RX FIFO, the user address points to the address in RAM where the data of the
next receive message will be read. The user notifies the FIFO that a message is written to
or read from RAM by incrementing the head/tail of the FIFO.
• The TXQ is a special transmit FIFO that transmits the messages based on the ID of the
messages stored in the queue.
• The TEF stores the message IDs of the transmitted messages.
• A free-running Time Base Counter (TBC) is used to timestamp received messages.
Messages in the TEF can also be timestamped.
• The CAN FD controller module generates interrupts when new messages are received or
when messages are transmitted successfully.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 4 2018 Microchip Technology Inc.
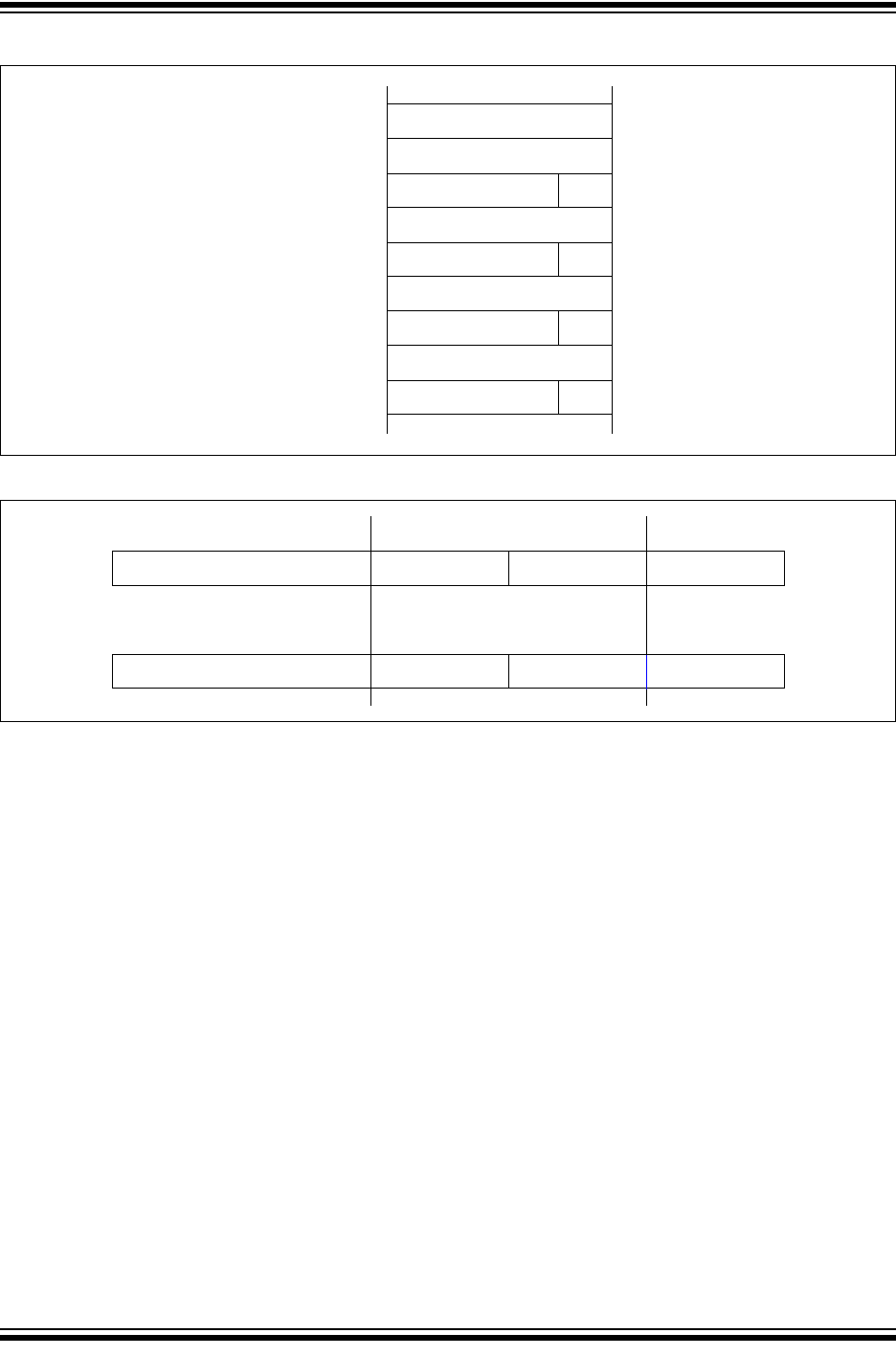
Figure 1-2 shows the System Block Diagram.
Figure 1-2: System Block Diagram
TX Handler
TX Prioritization
RX Handler
Filter and Masks
Timestamping
Interrupt Control
Error Handling Diagnostics
CxTX
CxRX
Device RAM
TEF
Message
Object 0
Message
Object 31
•
•
•
TXQ
Message
Object 0
Message
Object 31
•
•
•
FIFO 1
Message
Object 0
Message
Object 31
•
•
•
FIFO 31
Message
Object 0
Message
Object 31
•
•
•
•••

2018 Microchip Technology Inc. DS70005340A-page 5
CAN FD Protocol Module
2.0 CAN FD MESSAGE FRAMES
The ISO11898-1:2015 describes the different CAN message frames in detail. Figure 2-1
through Figure 2-6 explain and summarize the construction of the messages and fields.
There are four different CAN data/remote frames (see Figure 2-2):
• CAN Base Frame: Classic CAN 2.0 frame using Standard ID
• CAN FD Base Frame: CAN FD frame using Standard ID
• CAN Extended Frame: Classic CAN 2.0 frame using Extended ID
• CAN FD Extended Frame: CAN FD frame using Extended ID
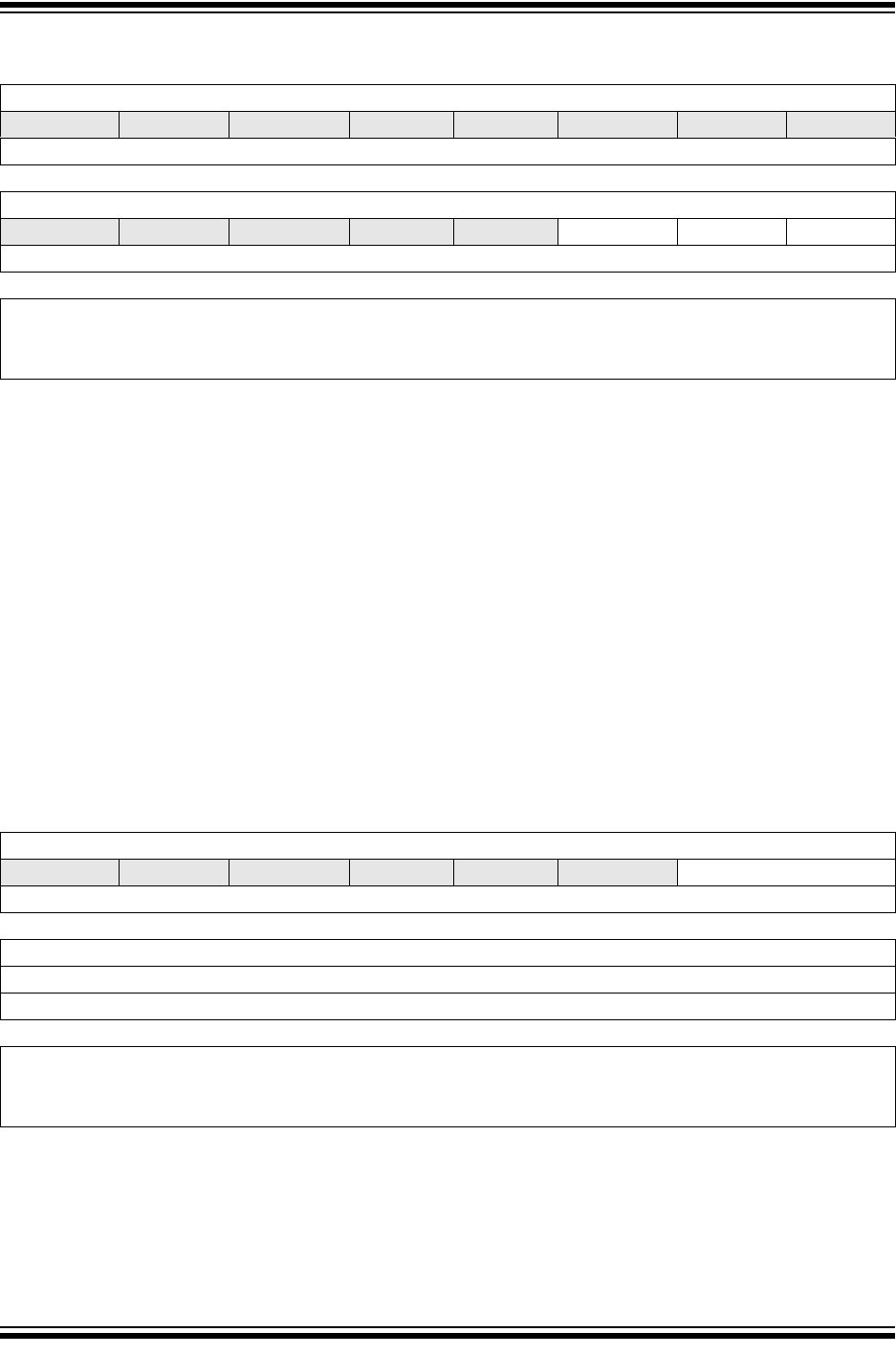
There are no remote frames in CAN FD frames; therefore, the RTR bit is replaced with the RRS
bit (see Figure 2-2). The RRS bit in the CAN FD base frame can be used to extend the SID to
12 bits. When enabled, it is referred to as SID11, it is the LSB of SID<11:0>.
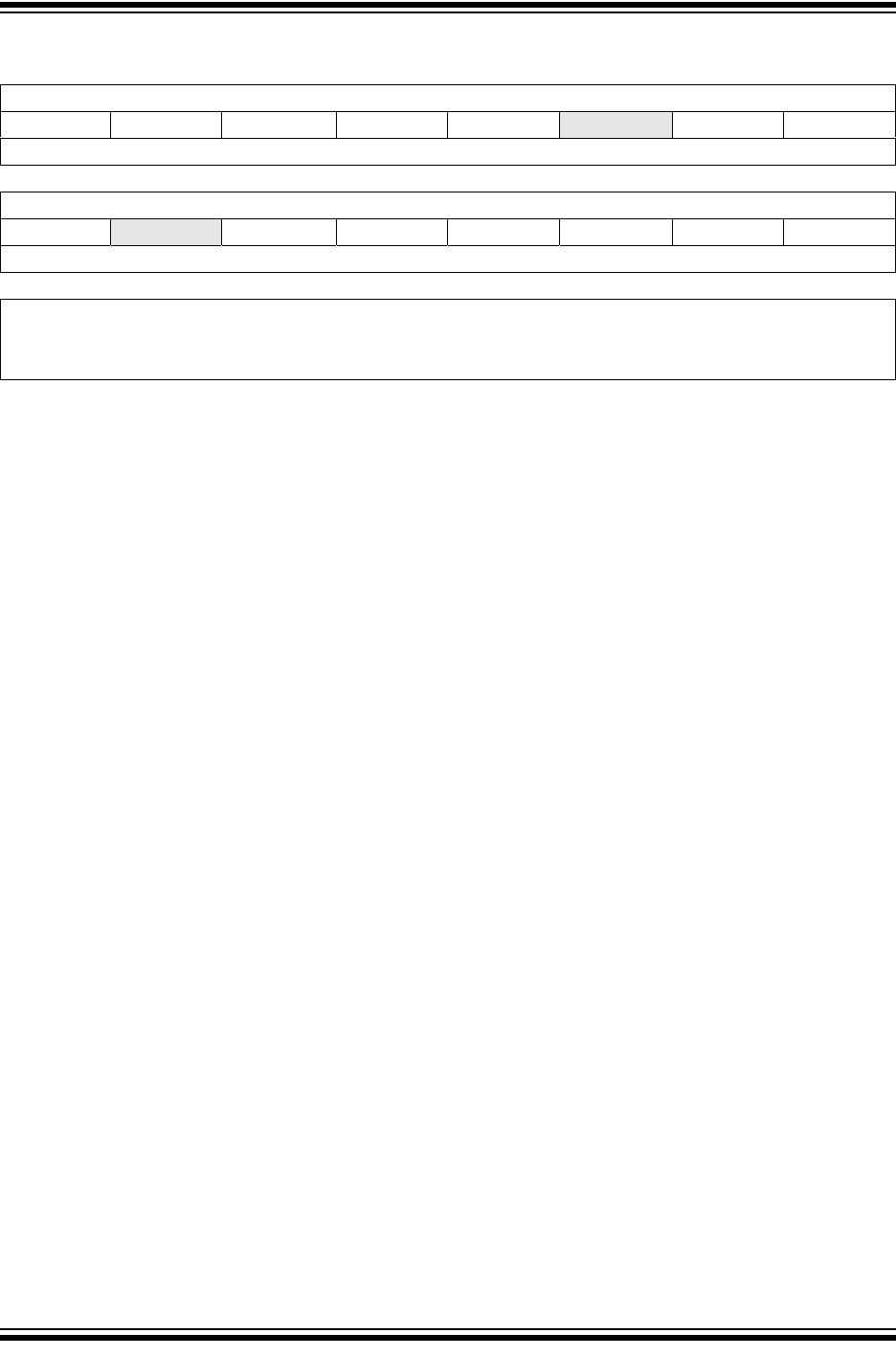
Figure 2-3 specifies the control field of the different CAN messages. Before CAN FD was added
to the ISO11898-1:2015, the FDF bit was a reserved bit. Now the FDF bit selects between
Classic and CAN FD formats.
The BRS bit selects if the bit rate should be switched in the data phase of CAN FD frames.
Figure 2-6 illustrates the error and overload frames. These special frames do not change.
2.1 ISO vs. NON-ISO CRC
To support the system validation of non-ISO CRC ECUs, the CAN FD controller module sup-
ports both ISO CRC (according to ISO11898-1:2015) and non-ISO CRC (see Figure 2-4 and
Figure 2-5). The CRC field is selectable using the ISOCRCEN bit (C1CONL<5>). The ISO CRC
field contains the stuff count. This count was not included in the original CAN FD specification; It
was added to fix a minor issue in the error detection of the original specification.
CAN FD frames use two different lengths of CRC: 17-bit for up to 16 data bytes and 21-bit for
20 or more data bytes. Technically, there are a total of six different CAN data/remove frames in
the CAN FD.
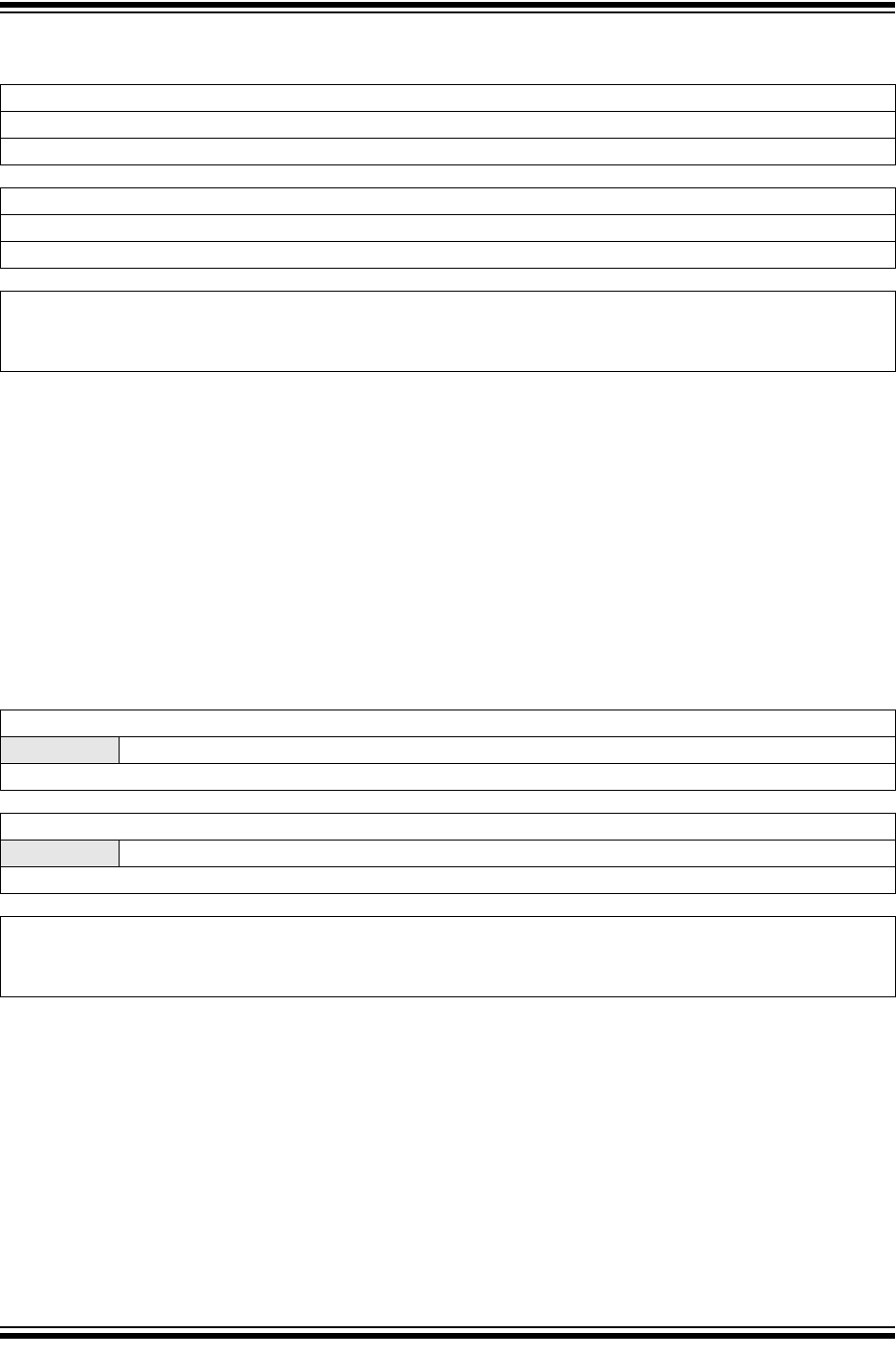
Figure 2-1: General Data Frame
Note: If an error is detected during the data phase of a CAN FD frame, the bit rate will be
switched back to the Nominal Bit Rate (NBR). Error frames are always transmitted
at the arbitration bit rate.
IFS
(= 3b)
SOF
(1b)
ARBITRATION (12/32b) CTRL (6/8/9b)
DATA
(0 to 64b)
CRC (16/18/22b)
CRC (16/22/26b)
ACK (2b) EOF (7b)
IFS
(= 3b)
DATA FRAME

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 6 2018 Microchip Technology Inc.
Figure 2-2: Arbitration Field
Figure 2-3: Control Field
Figure 2-4: ISO CRC Field
ARBITRATION (12/32b)
SID<10:0> RTR
SID<10:0>
RRS
SID11
EID<28:18> SRR IDE EID<17:0> RTR
EID<28:18> SRR IDE EID<17:0> RRS
CAN Base
CAN FD Base
CAN Ext.
CAN FD Ext.
CTRL (6/8/9b)
IDE FDF
IDE ESI
FDF DLC<3:0>
FDF ESI DLC<3:0>
CAN Base
CAN FD Base
CAN Ext.
CAN FD Ext.
DLC<3:0>
FDF BRS DLC<3:0>
r0
res BRS
CRC (16/22/26b)
CRC (15b)
CRC (15b)
CAN Base
CAN FD Base
CAN Ext.
CAN FD Ext.
CRC
CRC (17/21b)
BRS
DEL
CRC
DEL
STUFF
CNT (4b)
CRC
DEL
STUFF
CNT (4b)
CRC
DEL
2018 Microchip Technology Inc. DS70005340A-page 7
CAN FD Protocol Module
Figure 2-5: NON-ISO CRC Field
Figure 2-6: Error and Overload Frame
CRC (16/18/22b)
CRC (15b)
CRC (15b)
CAN Base
CAN FD Base
CAN Ext.
CAN FD Ext.
CRC
CRC (17/21b)
CRC (17/21b)
DEL
CRC
DEL
CRC
DEL
CRC
DEL
ANYWHERE WITHIN DATA FRAME ERRFLAG (6b) ERRDEL (8b) IFS (= 3b) or OVL
EOF or ERRDEL or OVLDEL OVLFLAG (6b) OVLDEL (8b) IFS (= 3b) or OVL
ERROR
OVERLOAD

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 8 2018 Microchip Technology Inc.
2.1.1 DLC ENCODING
The Data Length Code (DLC) specifies the number of data bytes a message frame contains.
Table 2-1 illustrates the encoding.
Table 2-1: DLC Encoding
Frame DLC Number of Data Bytes
CAN 2.0 and CAN FD 0 0
11
22
33
44
55
66
77
88
CAN 2.0 9-15 8
CAN FD 9 12
10 16
11 20
12 24
13 32
14 48
15 64

2018 Microchip Technology Inc. DS70005340A-page 9
CAN FD Protocol Module
3.0 CONTROL REGISTERS
CAN FD operations are controlled using the following Special Function Registers (SFRs). The
following registers are described later in this section:
• Register 3-1: C1CONH
• Register 3-2: C1CONL
• Register 3-3: C1NBTCFGH
• Register 3-4: C1NBTCFGL
• Register 3-5: C1DBTCFGH
• Register 3-6: C1DBTCFGL
• Register 3-7: C1TDCH
• Register 3-8: C1TDCL
• Register 3-9: C1TBCH
• Register 3-10: C1TBCL
• Register 3-11: C1TSCONH
• Register 3-12: C1TSCONL
• Register 3-13: C1VECH
• Register 3-14: C1VECL
• Register 3-15: C1INTH
• Register 3-16: C1INTL
• Register 3-17: C1RXIFH
• Register 3-18: C1RXIFL
• Register 3-19: C1RXOVIFH
• Register 3-20: C1RXOVIFL
• Register 3-21: C1TXIFH
• Register 3-22: C1TXIFL
• Register 3-23: C1TXATIFH
• Register 3-24: C1TXATIFL
• Register 3-25: C1TXREQH
• Register 3-26: C1TXREQL
• Register 3-27: C1FIFOBAH
• Register 3-28: C1FIFOBAL
• Register 3-29: C1TXQCONH
• Register 3-30: C1TXQCONL
• Register 3-31: C1TXQSTA
• Register 3-32: C1FIFOCONxH
• Register 3-33: C1FIFOCONxL
• Register 3-34: C1FIFOSTAx
• Register 3-35: C1TEFCONH
• Register 3-36: C1TEFCONL
• Register 3-37: C1TEFSTA
• Register 3-38: C1FOUAxH
• Register 3-39: C1FOUAxL
• Register 3-40: C1TEFUAH
• Register 3-41: C1TEFUAL
• Register 3-42: C1TXQUAH
• Register 3-43: C1TXQUAL
• Register 3-44: C1TRECH
• Register 3-45: C1TRECL
• Register 3-46: C1BDIAG0H
• Register 3-47: C1BDIAG0L
• Register 3-48: C1BDIAG1H
• Register 3-49: C1BDIAG1L
• Register 3-50: C1FLTCONxH
• Register 3-51: C1FLTCONxL
• Register 3-52: C1FLTOBJxH
• Register 3-53: C1FLTOBJxL
• Register 3-54: C1MASKxH
• Register 3-55: C1MASKxL

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 10 2018 Microchip Technology Inc.
Register 3-1: C1CONH: CAN Control Register High
R/W-0 R/W-0 R/W-0 R/W-0 S/HC-0 R/W-1 R/W-0 R/W-0
TXBWS3 TXBWS2 TXBWS1 TXBWS0 ABAT REQOP2 REQOP1 REQOP0
bit 15 bit 8
R-1 R-0 R-0 R/W-1 R/W-1 R/W-0 R/W-0 R/W-0
OPMOD2 OPMOD1 OPMOD1 TXQEN
(1)
STEF
(1)
SERRLOM
(1)
ESIGM
(1)
RTXAT
(1)
bit 7 bit 0
Legend: S = Settable bit HC = Hardware Clearable bit
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-12 TXBWS<3:0>: Transmit Bandwidth Sharing bits
1111-1100 = 4096
1011 = 2048
1010 = 1024
1001 = 512
1000 = 256
0111 = 128
0110 = 64
0101 = 32
0100 = 16
0011 = 8
0010 = 4
0001 = 2
0000 = No delay
bit 11 ABAT: Abort All Pending Transmissions bit
1 = Signals all transmit buffers to abort transmission
0 = Module will clear this bit when all transmissions are aborted
bit 10-8 REQOP<2:0>: Request Operation Mode bits
111 = Sets Restricted Operation mode
110 = Sets Normal CAN 2.0 mode; error frames on CAN FD frames
101 = Sets External Loopback mode
100 = Sets Configuration mode
011 = Sets Listen Only mode
010 = Sets Internal Loopback mode
001 = Sets Disable mode
000 = Sets Normal CAN FD mode; supports mixing of full CAN FD and Classic CAN 2.0 frames
bit 7-5 OPMOD<2:0>: Operation Mode Status bits
111 = Module is in Restricted Operation mode
110 = Module is in Normal CAN 2.0 mode; error frames on CAN FD frames
101 = Module is in External Loopback mode
100 = Module is in Configuration mode
011 = Module is in Listen Only mode
010 = Module is in Internal Loopback mode
001 = Module is in Disable mode
000 = Module is in Normal CAN FD mode; supports mixing of full CAN FD and Classic CAN 2.0 frames
bit 4 TXQEN: Enable Transmit Queue bit
(1)
1 = Enables TXQ and reserves space in RAM
0 = Does not reserve space in RAM for TXQ
Note 1: These bits can only be modified in Configuration mode (OPMOD<2:0> =
100
).

2018 Microchip Technology Inc. DS70005340A-page 11
CAN FD Protocol Module
bit 3 STEF: Store in Transmit Event FIFO bit
(1)
1 = Saves transmitted messages in TEF
0 = Does not save transmitted messages in TEF
bit 2 SERRLOM: Transition to Listen Only Mode on System Error bit
(1)
1 = Transitions to Listen Only mode
0 = Transitions to Restricted Operation mode
bit 1 ESIGM: Transmit ESI in Gateway Mode bit
(1)
1 = ESI is transmitted as recessive when the ESI of message is high or CAN controller is error passive
0 = ESI reflects error status of the CAN controller
bit 0 RTXAT: Restrict Retransmission Attempts bit
(1)
1 = Restricted retransmission attempts, uses TXAT<1:0> (C1FIFOCONxH<6:5>)
0 = Unlimited number of retransmission attempts, TXAT<1:0> bits will be ignored
Register 3-1: C1CONH: CAN Control Register High (Continued)
Note 1: These bits can only be modified in Configuration mode (OPMOD<2:0> =
100
).

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 12 2018 Microchip Technology Inc.
Register 3-2: C1CONL: CAN Control Register Low
R/W-0 U-0 R/W-0 R/W-0 R-0 R/W-1 R/W-1 R/W-1
CON
— SIDL BRSDIS BUSY WFT1 WFT0 WAKFIL
(1)
bit 15 bit 8
R/W-0 R/W-1 R/W-1 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
CLKSEL
(1)
PXEDIS
(1)
ISOCRCEN
(1)
DNCNT4 DNCNT3 DNCNT2 DNCNT1 DNCNT0
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15 CON: CAN Enable bit
1 = CAN module is enabled
0 = CAN module is disabled
bit 14 Unimplemented: Read as ‘0’
bit 13 SIDL: CAN Stop in Idle Control bit
1 = Stops module operation in Idle mode
0 = Does not stop module operation in Idle mode
bit 12 BRSDIS: Bit Rate Switching Disable bit (BRS)
1 = Bit Rate Switching is disabled, regardless of BRS in the transmit message object
0 = Bit Rate Switching depends on BRS in the transmit message object
bit 11 BUSY: CAN Module is Busy bit
1 = The CAN module is active
0 = The CAN module is inactive
bit 10-9 WFT<1:0>: Selectable Wake-up Filter Time bits
11 = T11
FILTER
10 = T10
FILTER
01 = T01
FILTER
00 = T00
FILTER
bit 8 WAKFIL: Enable CAN Bus Line Wake-up Filter bit
(1)
1 = Uses CAN bus line filter for wake-up
0 = CAN bus line filter is not used for wake-up
bit 7 CLKSEL: Module Clock Source Select bit
(1)
1 = Auxiliary clock is active when module is enabled
0 = CAN clock is not active when module is enabled
bit 6 PXEDIS: Protocol Exception Event Detection Disabled bit
(1)
A recessive “reserved bit” following a recessive FDF bit is called a “Protocol Exception”.
1 = Protocol exception is treated as a form error
0 = If a protocol exception is detected, CAN will enter the bus integrating state
bit 5 ISOCRCEN: Enable ISO CRC in CAN FD Frames bit
(1)
1 = Includes stuff bit count in CRC field and uses non-zero CRC initialization vector
0 = Does not include
Stuff Bit Co
unt in CRC field and uses CRC initialization vector with all zeros
bit 4-0 DNCNT<4:0>: DeviceNet™ Filter Bit Number bits
10011-11111 = Invalid selection (compares up to 18 bits of data with EIDx)
10010 = Compares up to DATA Byte 2, bit 6 with EID17
...
00001 = Compares up to Data Byte 0, bit 7 with EID0
00000 = Does not compare data bytes
Note 1: These bits can only be modified in Configuration mode (OPMOD<2:0> =
100
).
2018 Microchip Technology Inc. DS70005340A-page 13
CAN FD Protocol Module
Register 3-3: C1NBTCFGH: CAN Nominal Bit Time Configuration Register High
(1)
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
BRP<7:0>
bit 15 bit 8
R/W-0 R/W-0 R/W-1 R/W-1 R/W-1 R/W-1 R/W-0 R/W-0
TSEG1<7:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-8 BRP<7:0>: Baud Rate Prescaler bits
1111 1111 = T
Q
= 256/F
SYS
...
0000 0000 = T
Q
= 1/F
SYS
bit 7-0 TSEG1<7:0>: Time Segment 1 bits (Propagation Segment + Phase Segment 1)
1111 1111 = Length is 256 x T
Q
...
0000 0000 = Length is 1 x T
Q
Note 1: These bits can only be modified in Configuration mode (OPMOD<2:0> =
100
).
Register 3-4: C1NBTCFGL: CAN Nominal Bit Time Configuration Register Low
(1)
U-0 R/W-0 R/W-0 R/W-0 R/W-1 R/W-1 R/W-1 R/W-1
— TSEG2<6:0>
bit 15 bit 8
U-0 R/W-0 R/W-0 R/W-0 R/W-1 R/W-1 R/W-1 R/W-1
—SJW<6:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15 Unimplemented: Read as ‘0’
bit 14-8 TSEG2<6:0>: Time Segment 2 bits (Phase Segment 2)
111 1111 = Length is 128 x T
Q
...
000 0000 = Length is 1 x T
Q
bit 7 Unimplemented: Read as ‘0’
bit 6-0 SJW<6:0>: Synchronization Jump Width bits
111 1111 = Length is 128 x T
Q
...
000 0000 = Length is 1 x T
Q
Note 1: These bits can only be modified in Configuration mode (OPMOD<2:0> =
100
).

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 14 2018 Microchip Technology Inc.
Register 3-5: C1DBTCFGH: CAN Data Bit Time Configuration Register High
(1)
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
BRP<7:0>
bit 15 bit 8
U-0 U-0 U-0 R/W-0 R/W-1 R/W-1 R/W-1 R/W-0
— — — TSEG1<4:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-8 BRP<7:0>: Baud Rate Prescaler bits
1111 1111 = T
Q
= 256/F
SYS
...
0000 0000 = T
Q
= 1/F
SYS
bit 7-5 Unimplemented: Read as ‘0’
bit 4-0 TSEG1<4:0>: Time Segment 1 bits (Propagation Segment + Phase Segment 1)
1 1111 = Length is 32 x T
Q
...
0 0000 = Length is 1 x T
Q
Note 1: This register can only be modified in Configuration mode (OPMOD<2:0> = 100).
Register 3-6: C1DBTCFGL: CAN Data Bit Time Configuration Register Low
(1)
U-0 U-0 U-0 U-0 R/W-0 R/W-0 R/W-1 R/W-1
— — — — TSEG2<3:0>
bit 15 bit 8
U-0 U-0 U-0 U-0 R/W-0 R/W-0 R/W-1 R/W-1
— — — —SJW<3:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-12 Unimplemented: Read as ‘0’
bit 11-8 TSEG2<3:0>: Time Segment 2 bits (Phase Segment 2)
1111 = Length is 16 x T
Q
...
0000 = Length is 1 x T
Q
bit 7-4 Unimplemented: Read as ‘0’
bit 3-0 SJW<3:0>: Synchronization Jump Width bits
1111 = Length is 16 x T
Q
...
0000 = Length is 1 x T
Q
Note 1: This register can only be modified in Configuration mode (OPMOD<2:0> = 100).

2018 Microchip Technology Inc. DS70005340A-page 15
CAN FD Protocol Module
Register 3-7: C1TDCH: CAN Transmitter Delay Compensation Register High
(1)
U-0 U-0 U-0 U-0 U-0 U-0 R/W-0 R/W-0
— — — — — — EDGFLTEN SID11EN
bit 15 bit 8
U-0 U-0 U-0 U-0 U-0 U-0 R/W-1 R/W-0
— — — — — — TDCMOD1 TDCMOD0
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-10 Unimplemented: Read as ‘0’
bit 9 EDGFLTEN: Enable Edge Filtering During Bus Integration State bit
1 = Edge filtering is enabled according to ISO11898-1:2015
0 = Edge filtering is disabled
bit 8 SID11EN: Enable 12-Bit SID in CAN FD Base Format Messages bit
1 = RRS is used as SID11 in CAN FD base format messages: SID<11:0> = {SID<10:0>, SID11}
0 = Does not use RRS; SID<10:0>
bit 7-2 Unimplemented: Read as ‘0’
bit 1-0 TDCMOD<1:0>: Transmitter Delay Compensation mode bits (Secondary Sample Point (SSP))
10-11 = Auto: Measures delay and adds TSEG1<4:0> (C1DBTCFGH<4:0>); add TDCO<6:0>
01 = Manual: Does not measure, uses TDCV<5:0> + TDCO<6:0> from register
00 = Disables
Note 1: This register can only be modified in Configuration mode (OPMOD<2:0> = 100).

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 16 2018 Microchip Technology Inc.
Register 3-8: C1TDCL: CAN Transmitter Delay Compensation Register Low
(1)
U-0 R/W-0 R/W-0 R/W-1 R/W-0 R/W-0 R/W-0 R/W-0
— TDCO<6:0>
bit 15 bit 8
U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— — TDCV<5:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15 Unimplemented: Read as ‘0’
bit 14-8 TDCO<6:0>: Transmitter Delay Compensation Offset bits (Secondary Sample Point (SSP))
111 1111 = -64 x T
CY
...
011 1111 = 63 x T
CY
...
000 0000 = 0 x T
CY
bit 7-6 Unimplemented: Read as ‘0’
bit 5-0 TDCV<5:0>: Transmitter Delay Compensation Value bits (Secondary Sample Point (SSP))
11 1111 = 63 x T
CY
...
00 0000 = 0 x T
CY
Note 1: This register can only be modified in Configuration mode (OPMOD<2:0> = 100).

2018 Microchip Technology Inc. DS70005340A-page 17
CAN FD Protocol Module
Register 3-9: C1TBCH: CAN Time Base Counter Register High
(1,2)
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
TBC<31:24>
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
TBC<23:16>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 TBC<31:16> CAN Time Base Counter bits
This is a free-running timer that increments every TBCPRE<9:0> clock when TBCEN is set.
Note 1: The Time Base Counter (TBC) will be stopped and reset when TBCEN = 0 to save power.
2: The TBC prescaler count will be reset on any write to C1TBCH/L (TBCPREx will be unaffected).
Register 3-10: C1TBCL: CAN Time Base Counter Register Low
(1,2)
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
TBC<15:8>
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
TBC<7:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 TBC<15:0> CAN Time Base Counter bits
This is a free-running timer that increments every TBCPRE<9:0> clock when TBCEN is set.
Note 1: The TBC will be stopped and reset when TBCEN = 0 to save power.
2: The TBC prescaler count will be reset on any write to C1TBCH/L (TBCPREx will be unaffected).
dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 18 2018 Microchip Technology Inc.
Register 3-11: C1TSCONH: CAN Timestamp Control Register High
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 15 bit 8
U-0 U-0 U-0 U-0 U-0 R/W-0 R/W-0 R/W-0
— — — — — TSRES TSEOF TBCEN
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-3 Unimplemented: Read as ‘0’
bit 2 TSRES: Timestamp Reset bit (CAN FD frames only)
1 = At sample point of the bit following the FDF bit
0 = At sample point of Start-of-Frame (SOF)
bit 1 TSEOF: Timesstamp End-of-Frame (EOF) bit
1 = Timestamp when frame is taken valid (11898-1 10.7):
- RX no error until last, but one bit of EOF
- TX no error until the end of EOF
0 = Timestamp at “beginning” of frame:
- Classical Frame: At sample point of SOF
- FD Frame: see TSRES bit
bit 0 TBCEN: Time Base Counter (TBC) Enable bit
1 = Enables TBC
0 = Stops and resets TBC
Register 3-12: C1TSCONL: CAN Timestamp Control Register Low
U-0 U-0 U-0 U-0 U-0 U-0 R/W-0 R/W-0
— — — — — — TBCPRE<9:8>
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
TBCPRE<7:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-10 Unimplemented: Read as ‘0’
bit 9-0 TBCPRE<9:0>: CAN Time Base Counter Prescaler bits
1023 = TBC increments every 1024 clocks
...
0 = TBC increments every 1 clock

2018 Microchip Technology Inc. DS70005340A-page 19
CAN FD Protocol Module
Register 3-13: C1VECH: CAN Interrupt Code Register High
U-0 R-1 R-0 R-0 R-0 R-0 R-0 R-0
— RXCODE<6:0>
bit 15 bit 8
U-0 R-1 R-0 R-0 R-0 R-0 R-0 R-0
— TXCODE<6:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15 Unimplemented: Read as ‘0’
bit 14-8 RXCODE<6:0>: Receive Interrupt Flag Code bits
1000001-1111111 = Reserved
1000000 = No interrupt
0100000-0111111 = Reserved
0011111 = FIFO 31 interrupt (RFIF<31> is set)
...
0000010 = FIFO 2 interrupt (RFIF<2> is set)
0000001 = FIFO 1 interrupt (RFIF<1> is set)
0000000 = Reserved; FIFO 0 cannot receive
bit 7 Unimplemented: Read as ‘0’
bit 6-0 TXCODE<6:0>: Transmit Interrupt Flag Code bits
1000001-1111111 = Reserved
1000000 = No interrupt
0100000-0111111 = Reserved
0011111 = FIFO 31 interrupt (TFIF<31> is set)
...
0000001 = FIFO 1 interrupt (TFIF<1> is set)
0000000 = FIFO 0 interrupt (TFIF<0> is set)

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 20 2018 Microchip Technology Inc.
Register 3-14: C1VECL: CAN Interrupt Code Register Low
U-0 U-0 U-0 R-0 R-0 R-0 R-0 R-0
— — —FILHIT<4:0>
bit 15 bit 8
U-0 R-1 R-0 R-0 R-0 R-0 R-0 R-0
— ICODE<6:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-13 Unimplemented: Read as ‘0’
bit 12-8 FILHIT<4:0>: Filter Hit Number bits
11111 = Filter 31
11110 = Filter 30
...
00001 = Filter 1
00000 = Filter 0
bit 7 Unimplemented: Read as ‘0’
bit 6-0 ICODE<6:0>: Interrupt Flag Code bits
1001011-1111111 = Reserved
1001010 = Transmit attempt interrupt (any bit in C1TXATIF is set)
1001001 = Transmit event FIFO interrupt (any bit in C1TEFSTA is set)
1001000 = Invalid message occurred (IVMIF/IE)
1000111 = CAN module mode change occurred (MODIF/IE)
1000110 = CAN timer overflow (TBCIF/IE)
1000101 = RX/TX MAB overflow/underflow (RX: Message received before previous message was
saved to memory; TX: Can't feed TX MAB fast enough to transmit consistent data)
(SERRIF/IE)
1000100 = Address error interrupt (illegal FIFO address presented to system) (SERRIF/IE)
1000011 = Receive FIFO overflow interrupt (any bit in C1RXOVIF is set)
1000010 = Wake-up interrupt (WAKIF/WAKIE)
1000001 = Error interrupt (CERRIF/IE)
1000000 = No interrupt
0100000-0111111 = Reserved
0011111 = FIFO 31 interrupt (TFIF31 or RFIF31 is set)
...
0000001 = FIFO 1 Interrupt (TFIF1 or RFIF1 is set)
0000000 = FIFO 0 Interrupt (TFIF0 is set)

2018 Microchip Technology Inc. DS70005340A-page 21
CAN FD Protocol Module
Register 3-15: C1INTH: CAN Interrupt Register High
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 U-0 U-0
IVMIE WAKIE CERRIE SERRIE RXOVIE TXATIE
— —
bit 15 bit 8
U-0 U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— — — TEFIE MODIE TBCIE RXIE TXIE
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15 IVMIE: Invalid Message Interrupt Enable bit
1 = Invalid message interrupt is enabled
0 = Invalid message interrupt is disabled
bit 14 WAKIE: Bus Wake-up Activity Interrupt Enable bit
1 = Wake-up activity interrupt is enabled
0 = Wake-up activity interrupt is disabled
bit 13 CERRIE: CAN Bus Error Interrupt Enable bit
1 = CAN bus error interrupt is enabled
0 = CAN bus error interrupt is disabled
bit 12 SERRIE: System Error Interrupt Enable bit
1 = System error interrupt is enabled
0 = System error interrupt is disabled
bit 11 RXOVIE: Receive Buffer Overflow Interrupt Enable bit
1 = Receive buffer overflow interrupt is enabled
0 = Receive buffer overflow interrupt is disabled
bit 10 TXATIE: Transmit Attempt Interrupt Enable bit
1 = Transmit attempt interrupt is enabled
0 = Transmit attempt interrupt is disabled
bit 9-5 Unimplemented: Read as ‘0’
bit 4 TEFIE: Transmit Event FIFO Interrupt Enable bit
1 = Transmit event FIFO interrupt is enabled
0 = Transmit event FIFO interrupt is disabled
bit 3 MODIE: Mode Change Interrupt Enable bit
1 = Mode change interrupt is enabled
0 = Mode change interrupt is disabled
bit 2 TBCIE: CAN Timer Interrupt Enable bit
1 = CAN timer interrupt is enabled
0 = CAN timer interrupt is disabled
bit 1 RXIE: Receive Object Interrupt Enable bit
1 = Receive object interrupt is enabled
0 = Receive object interrupt is disabled
bit 0 TXIE: Transmit Object Interrupt Enable bit
1 = Transmit object interrupt is enabled
0 = Transmit object interrupt is disabled

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 22 2018 Microchip Technology Inc.
Register 3-16: C1INTL: CAN Interrupt Register Low
HS/C-0 HS/C-0 HS/C-0 HS/C-0 R-0 R-0 U-0 U-0
IVMIF
(1)
WAKIF
(1)
CERRIF
(1)
SERRIF
(1)
RXOVIF TXATIF — —
bit 15 bit 8
U-0 U-0 U-0 R-0 HS/C-0 HS/C-0 R-0 R-0
— — —TEFIFMODIF
(1)
TBCIF
(1)
RXIF TXIF
bit 7 bit 0
Legend: HS = Hardware Settable bit C = Clearable bit
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15 IVMIF: Invalid Message Interrupt Flag bit
(1)
1 = Invalid message interrupt occurred
0 = No invalid message interrupt
bit 14 WAKIF: Bus Wake-up Activity Interrupt Flag bit
(1)
1 = Wake-up activity interrupt occurred
0 = No wake-up activity interrupt
bit 13 CERRIF: CAN Bus Error Interrupt Flag bit
(1)
1 = CAN bus error interrupt occurred
0 = No CAN bus error interrupt
bit 12 SERRIF: System Error Interrupt flag bit
(1)
1 = System error interrupt occurred
0 = No system error interrupt
bit 11 RXOVIF: Receive Buffer Overflow Interrupt Flag bit
1 = Receive buffer overflow interrupt occurred
0 = No receive buffer overflow interrupt
bit 10 TXATIF: Transmit Attempt Interrupt Flag bit
1 = Transmit attempt interrupt occurred
0 = No transmit attempt interrupt
bit 9-5 Unimplemented: Read as ‘0’
bit 4 TEFIF: Transmit Event FIFO Interrupt Flag bit
1 = Transmit event FIFO interrupt occurred
0 = No transmit event FIFO
bit 3 MODIF: CAN Mode Change Interrupt Flag bit
(1)
1 = CAN module mode change occurred (OPMOD<2:0> have changed to reflect REQOP<2:0>)
0 = No mode change occurred
bit 2 TBCIF: CAN Timer Overflow Interrupt Flag bit
(1)
1 = TBC has overflowed
0 = TBC has not overflow
bit 1 RXIF: Receive Object Interrupt Flag bit
1 = Receive object interrupt is pending
0 = No receive object interrupts are pending
bit 0 TXIF: Transmit Object Interrupt Flag bit
1 = Transmit object interrupt is pending
0 = No transmit object interrupts are pending
Note 1: C1INTL: Flags are set by hardware and cleared by application.

2018 Microchip Technology Inc. DS70005340A-page 23
CAN FD Protocol Module
Register 3-17: C1RXIFH: CAN Receive Interrupt Status Register High
(1)
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
RFIF<31:24>
bit 15 bit 8
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
RFIF<23:16>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 RFIF<31:16>: Receive FIFO Interrupt Pending bits
1 = One or more enabled receive FIFO interrupts are pending
0 = No enabled receive FIFO interrupts are pending
Note 1: C1RXIFH: FIFO: RFIFx = ‘or’ of enabled RX FIFO flags (flags need to be cleared in the FIFO register).
Register 3-18: C1RXIFL: CAN Receive Interrupt Status Register Low
(1)
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
RFIF<15:8>
bit 15 bit 8
R-0 R-0 R-0 R-0 R-0 R-0 R-0 U-0
RFIF<7:1>
—
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-1 RFIF<15:1>: Receive FIFO Interrupt Pending bits
1 = One or more enabled receive FIFO interrupts are pending
0 = No enabled receive FIFO interrupts are pending
bit 0 Unimplemented: Read as ‘0’
Note 1: C1RXIFL: FIFO: RFIFx = ‘or’ of enabled RX FIFO flags (flags need to be cleared in the FIFO register).

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 24 2018 Microchip Technology Inc.
Register 3-19: C1RXOVIFH: CAN Receive Overflow Interrupt Status Register High
(1)
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
RFOVIF<31:24>
bit 15 bit 8
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
RFOVIF<23:16>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 RFOVIF<31:16>: Receive FIFO Overflow Interrupt Pending bits
1 = Interrupt is pending
0 = Interrupt is not pending
Note 1: C1RXOVIFH: FIFO: RFOVIFx (flag needs to be cleared in the FIFO register).
Register 3-20: C1RXOVIFL: CAN Receive Overflow Interrupt Status Register Low
(1)
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
RFOVIF<15:8>
bit 15 bit 8
R-0 R-0 R-0 R-0 R-0 R-0 R-0 U-0
RFOVIF<7:1>
—
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-1 RFOVIF<15:1>: Receive FIFO Overflow Interrupt Pending bits
1 = Interrupt is pending
0 = Interrupt is not pending
bit 0 Unimplemented: Read as ‘0’
Note 1: C1RXOVIFL: FIFO: RFOVIFx (flag needs to be cleared in the FIFO register)

2018 Microchip Technology Inc. DS70005340A-page 25
CAN FD Protocol Module
Register 3-21: C1TXIFH: CAN Transmit Interrupt Status Register High
(1)
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
TFIF<31:24>
bit 15 bit 8
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
TFIF<23:16>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 TFIF<31:16>: Transmit FIFO/TXQ Interrupt Pending bits
1 = One or more enabled transmit FIFO/TXQ interrupts are pending
0 = No enabled transmit FIFO/TXQ interrupts are pending
Note 1: C1TXIFH: FIFO: TFIFx = ‘or’ of the enabled TX FIFO flags (flags need to be cleared in the FIFO register).
Register 3-22: C1TXIFL: CAN Transmit Interrupt Status Register Low
(1)
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
TFIF<15:8>
bit 15 bit 8
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
TFIF<7:0>
(2)
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 TFIF<15:0>: Transmit FIFO/TXQ Interrupt Pending bits
(2)
1 = One or more enabled transmit FIFO/TXQ interrupts are pending
0 = No enabled transmit FIFO/TXQ interrupts are pending
Note 1: C1TXIFL: FIFO: TFIFx = ‘or’ of the enabled TX FIFO flags (flags need to be cleared in the FIFO register).
2: TFIF0 is for the TXQ.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 26 2018 Microchip Technology Inc.
Register 3-23: C1TXATIFH: CAN Transmit Attempt Interrupt Status Register High
(1)
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
TFATIF<31:24>
bit 15 bit 8
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
TFATIF<23:16>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 TFATIF<31:16>: Transmit FIFO/TXQ Attempt Interrupt Pending bits
1 = Interrupt is pending
0 = Interrupt is not pending
Note 1: C1TXATIFH: FIFO: TFATIFx (flag needs to be cleared in the FIFO register).
Register 3-24: C1TXATIFL: CAN Transmit Attempt Interrupt Status Register Low
(1)
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
TFATIF<15:8>
bit 15 bit 8
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
TFATIF<7:0>
(2)
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 TFATIF<15:0>: Transmit FIFO/TXQ Attempt Interrupt Pending bits
(2)
1 = Interrupt is pending
0 = Interrupt is not pending
Note 1: C1TXATIFL: FIFO: TFATIFx (flag needs to be cleared in the FIFO register).
2: TFATIF0 is for the TXQ.

2018 Microchip Technology Inc. DS70005340A-page 27
CAN FD Protocol Module
Register 3-25: C1TXREQH: CAN Transmit Request Register High
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
TXREQ<31:24>
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
TXREQ<23:16>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 TXREQ<31:16>: Message Send Request bits
TXEN =
1 (object configured as a transmit object):
Setting this bit to ‘1’ requests sending a message. The bit will automatically clear when the message(s)
queued in the object is (are) successfully sent. This bit can NOT be used for aborting a transmission.
TXEN =
0 (object configured as a receive object):
This bit has no effect.
Register 3-26: C1TXREQL: CAN Transmit Request Register Low
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
TXREQ<15:8>
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
TXREQ<7:1> TXREQ0
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-1 TXREQ<15:0>: Message Send Request bits
TXEN =
1 (object configured as a transmit object):
Setting this bit to ‘1’ requests sending a message. The bit will automatically clear when the message(s)
queued in the object is (are) successfully sent. This bit can NOT be used for aborting a transmission.
TXEN =
0 (object configured as a receive object):
This bit has no effect.
bit 0 TXREQ0: Transmit Queue Message Send Request bit
Setting this bit to ‘1’ requests sending a message. The bit will automatically clear when the message(s)
queued in the object is (are) successfully sent. This bit can NOT be used for aborting a transmission.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 28 2018 Microchip Technology Inc.
Register 3-27: C1FIFOBAH: CAN Message Memory Base Address Register High
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
FIFOBA<31:24>
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
FIFOBA<23:16>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 FIFOBA<31:16>: Message Memory Base Address bits
Defines the base address for the transmit event FIFO followed by the message objects.
Register 3-28: C1FIFOBAL: CAN Message Memory Base Address Register Low
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
FIFOBA<15:8>
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
FIFOBA<7:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 FIFOBA<15:0>: Message Memory Base Address bits
Defines the base address for the transmit event FIFO followed by the message objects.

2018 Microchip Technology Inc. DS70005340A-page 29
CAN FD Protocol Module
Register 3-29: C1TXQCONH: CAN Transmit Queue Control Register High
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
PLSIZE2
(1)
PLSIZE1
(1)
PLSIZE0
(1)
FSIZE4
(1)
FSIZE3
(1)
FSIZE2
(1)
FSIZE1
(1)
FSIZE0
(1)
bit 15 bit 8
U-0 R/W-1 R/W-1 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— TXAT1 TXAT0 TXPRI4 TXPRI3 TXPRI2 TXPRI1 TXPRI0
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-13 PLSIZE<2:0>: Payload Size bits
(1)
111 = 64 data bytes
110 = 48 data bytes
101 = 32 data bytes
100 = 24 data bytes
011 = 20 data bytes
010 = 16 data bytes
001 = 12 data bytes
000 = 8 data bytes
bit 12-8 FSIZE<4:0>: FIFO Size bits
(1)
11111 = FIFO is 32 messages deep
...
00010 = FIFO is 3 messages deep
00001 = FIFO is 2 messages deep
00000 = FIFO is 1 message deep
bit 7 Unimplemented: Read as ‘0’
bit 6-5 TXAT<1:0>: Retransmission Attempts bits
This feature is enabled when RTXAT (C1CONH<0>) is set.
11 = Unlimited number of retransmission attempts
10 = Unlimited number of retransmission attempts
01 = Three retransmission attempts
00 = Disable retransmission attempts
bit 4-0 TXPRI<4:0>: Message Transmit Priority bits
11111 = Highest message priority
...
00000 = Lowest message priority
Note 1: These bits can only be modified in Configuration mode (OPMOD<2:0> = 100).

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 30 2018 Microchip Technology Inc.
Register 3-30: C1TXQCONL: CAN Transmit Queue Control Register Low
U-0 U-0 U-0 U-0 U-0 S/HC-1 R/W/HC-0 S/HC-0
— — — — — FRESET TXREQ UINC
bit 15 bit 8
R-1 U-0 U-0 R/W-0 U-0 R/W-0 U-0 R/W-0
TXEN
(1)
— —TXATIE— TXQEIE —TXQNIE
bit 7 bit 0
Legend: S = Settable bit HC = Hardware Clearable bit
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-11 Unimplemented: Read as ‘0’
bit 10 FRESET: FIFO Reset bit
1 = FIFO will be reset when bit is set, cleared by hardware when FIFO is reset; user should poll
whether this bit is clear before taking any action
0 = No effect
bit 9 TXREQ: Message Send Request bit
1 = Requests sending a message; the bit will automatically clear when all the messages queued in
the TXQ are successfully sent
0 = Clearing the bit to ‘0’ while set (‘1’) will request a message abort
bit 8 UINC: Increment Head/Tail bit
When this bit is set, the FIFO head will increment by a single message.
bit 7 TXEN: TX Enable
(1)
1 = Transmit Message Queue. This bit always reads as ‘1’.
bit 6-5 Unimplemented: Read as ‘0’
bit 4 TXATIE: Transmit Attempts Exhausted Interrupt Enable bit
1 = Enables interrupt
0 = Disables interrupt
bit 3 Unimplemented: Read as ‘0’
bit 2 TXQEIE: Transmit Queue Empty Interrupt Enable bit
1 = Interrupt is enabled for TXQ empty
0 = Interrupt is disabled for TXQ empty
bit 1 Unimplemented: Read as ‘0’
bit 0 TXQNIE: Transmit Queue Not Full Interrupt Enable bit
1 = Interrupt is enabled for TXQ not full
0 = Interrupt is disabled for TXQ not full
Note 1: Please refer to the specific device data sheet for the Reset value of the TXEN bit.

2018 Microchip Technology Inc. DS70005340A-page 31
CAN FD Protocol Module
Register 3-31: C1TXQSTA: CAN Transmit Queue Status Register
U-0 U-0 U-0 R-0 R-0 R-0 R-0 R-0
— — —TXQCI4
(1)
TXQCI3
(1)
TXQCI2
(1)
TXQCI1
(1)
TXQCI0
(1)
bit 15 bit 8
R-0 R-0 R-0 HS/C-0 U-0 R-1 U-0 R-1
TXABT
(2)
TXLARB
(2)
TXERR
(2)
TXATIF — TXQEIF —TXQNIF
bit 7 bit 0
Legend: HS = Hardware Settable bit C = Clearable bit
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-13 Unimplemented: Read as ‘0’
bit 12-8 TXQCI<4:0>: Transmit Queue Message Index bits
(1)
A read of this register will return an index to the message that the FIFO will next attempt to transmit.
bit 7 TXABT: Message Aborted Status bit
(2)
1 = Message was aborted
0 = Message completed successfully
bit 6 TXLARB: Message Lost Arbitration Status bit
(2)
1 = Message lost arbitration while being sent
0 = Message did not lose arbitration while being sent
bit 5 TXERR: Error Detected During Transmission bit
(2)
1 = A bus error occurred while the message was being sent
0 = A bus error did not occur while the message was being sent
bit 4 TXATIF: Transmit Attempts Exhausted Interrupt Pending bit
1 = Interrupt is pending
0 = Interrupt is not pending
bit 3 Unimplemented: Read as ‘0’
bit 2 TXQEIF: Transmit Queue Empty Interrupt Flag bit
1 = TXQ is empty
0 = TXQ is not empty, at least 1 message is queued to be transmitted
bit 1 Unimplemented: Read as ‘0’
bit 0 TXQNIF: Transmit Queue Not Full Interrupt Flag bit
1 = TXQ is not full
0 = TXQ is full
Note 1: The TXQCI<4:0> bits give a zero-indexed value to the message in the TXQ. If the TXQ is 4 messages
deep (FSIZE = 3), TXQCIx will take on a value of 0 to 3, depending on the state of the TXQ.
2: These bits are updated when a message completes (or aborts) or when the TXQ is reset.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 32 2018 Microchip Technology Inc.
Register 3-32: C1FIFOCONxH: CAN FIFO Control Register x (x = 1 to 31) High
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
PLSIZE2
(1)
PLSIZE1
(1)
PLSIZE0
(1)
FSIZE4
(1)
FSIZE3
(1)
FSIZE2
(1)
FSIZE1
(1)
FSIZE0
(1)
bit 15 bit 8
U-0 R/W-1 R/W-1 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— TXAT1 TXAT0 TXPRI4 TXPRI3 TXPRI2 TXPRI1 TXPRI0
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-13 PLSIZE<2:0>: Payload Size bits
(1)
111 = 64 data bytes
110 = 48 data bytes
101 = 32 data bytes
100 = 24 data bytes
011 = 20 data bytes
010 = 16 data bytes
001 = 12 data bytes
000 = 8 data bytes
bit 12-8 FSIZE<4:0>: FIFO Size bits
(1)
11111 = FIFO is 32 messages deep
...
00010 = FIFO is 3 messages deep
00001 = FIFO is 2 messages deep
00000 = FIFO is 1 message deep
bit 7 Unimplemented: Read as ‘0’
bit 6-5 TXAT<1:0>: Retransmission Attempts bits
This feature is enabled when RTXAT (C1CONH<0>) is set.
11 = Unlimited number of retransmission attempts
10 = Unlimited number of retransmission attempts
01 = Three retransmission attempts
00 = DisableS retransmission attempts
bit 4-0 TXPRI<4:0>: Message Transmit Priority bits
11111 = Highest message priority
...
00000 = Lowest message priority
Note1: These bits can only be modified in Configuration mode (OPMOD<2:0> = 100).

2018 Microchip Technology Inc. DS70005340A-page 33
CAN FD Protocol Module
Register 3-33: C1FIFOCONxL: CAN FIFO Control Register x (x = 1 to 31) Low
U-0 U-0 U-0 U-0 U-0 S/HC-1 R/W/HC-0 S/HC-0
— — — — — FRESET TXREQ UINC
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
TXEN RTREN RXTSEN
(1)
TXATIE RXOVIE TFERFFIE TFHRFHIE TFNRFNIE
bit 7 bit 0
Legend: S = Settable bit HC = Hardware Clearable bit
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-11 Unimplemented: Read as ‘0’
bit 10 FRESET: FIFO Reset bit
1 = FIFO will be reset when bit is set, cleared by hardware when FIFO is reset; user should poll
whether this bit is clear before taking any action
0 = No effect
bit 9 TXREQ: Message Send Request bit
TXEN =
1 (FIFO configured as a transmit FIFO):
1 = Requests sending a message; the bit will automatically clear when all the messages queued in
the FIFO are successfully sent
0 = Clearing the bit to ‘0’ while set (‘1’) will request a message abort
TXEN = 0 (FIFO configured as a receive FIFO):
This bit has no effect.
bit 8 UINC: Increment Head/Tail bit
TXEN = 1 (FIFO configured as a transmit FIFO):
When this bit is set, the FIFO head will increment by a single message.
TXEN = 0 (FIFO configured as a receive FIFO):
When this bit is set, the FIFO tail will increment by a single message.
bit 7 TXEN: TX/RX Buffer Selection bit
1 = Transmits message object
0 = Receives message object
bit 6 RTREN: Auto-Remote Transmit (RTR) Enable bit
1 = When a Remote Transmit is received, TXREQ will be set
0 = When a Remote Transmit is received, TXREQ will be unaffected
bit 5 RXTSEN: Received Message Timestamp Enable bit
(1)
1 = Captures timestamp in received message object in RAM
0 = Does not capture time stamp
bit 4 TXATIE: Transmit Attempts Exhausted Interrupt Enable bit
1 = Enables interrupt
0 = Disables interrupt
bit 3 RXOVIE: Overflow Interrupt Enable bit
1 = Interrupt is enabled for overflow event
0 = Interrupt is disabled for overflow event
Note1: These bits can only be modified in Configuration mode (OPMOD<2:0> = 100).

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 34 2018 Microchip Technology Inc.
bit 2 TFERFFIE: Transmit/Receive FIFO Empty/Full Interrupt Enable bit
TXEN =
1 (FIFO configured as a transmit FIFO):
Transmit FIFO Empty Interrupt Enable
1 = Interrupt is enabled for FIFO empty
0 = Interrupt is disabled for FIFO empty
TXEN =
0 (FIFO configured as a receive FIFO):
Receive FIFO Full Interrupt Enable
1 = Interrupt is enabled for FIFO full
0 = Interrupt is disabled for FIFO full
bit 1 TFHRFHIE: Transmit/Receive FIFO Half Empty/Half Full Interrupt Enable bit
TXEN = 1 (FIFO configured as a transmit FIFO):
Transmit FIFO Half Empty Interrupt Enable
1 = Interrupt is enabled for FIFO half empty
0 = Interrupt is disabled for FIFO half empty
TXEN =
0 (FIFO configured as a receive FIFO):
Receive FIFO Half Full Interrupt Enable
1 = Interrupt is enabled for FIFO half full
0 = Interrupt is disabled for FIFO half full
bit 0 TFNRFNIE: Transmit/Receive FIFO Not Full/Not Empty Interrupt Enable bit
TXEN = 1 (FIFO configured as a transmit FIFO):
Transmit FIFO Not Full Interrupt Enable
1 = Interrupt is enabled for FIFO not full
0 = Interrupt is disabled for FIFO not full
TXEN =
0 (FIFO configured as a receive FIFO):
Receive FIFO Not Empty Interrupt Enable
1 = Interrupt is enabled for FIFO not empty
0 = Interrupt is disabled for FIFO not empty
Register 3-33: C1FIFOCONxL: CAN FIFO Control Register x (x = 1 to 31) Low (Continued)
Note1: These bits can only be modified in Configuration mode (OPMOD<2:0> = 100).

2018 Microchip Technology Inc. DS70005340A-page 35
CAN FD Protocol Module
Register 3-34: C1FIFOSTAx: CAN FIFO Status Register x (x = 1 to 31)
U-0 U-0 U-0 R-0 R-0 R-0 R-0 R-0
— — — FIFOCI4
(1)
FIFOCI3
(1)
FIFOCI2
(1)
FIFOCI1
(1)
FIFOCI0
(1)
bit 15 bit 8
R-0 R-0 R-0 HS/C-0 HS/C-0 R-0 R-0 R-0
TXABT
(3)
TXLARB
(2)
TXERR
(2)
TXATIF RXOVIF TFERFFIF TFHRFHIF TFNRFNIF
bit 7 bit 0
Legend: HS = Hardware Settable bit C = Clearable bit
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-13 Unimplemented: Read as ‘0’
bit 12-8 FIFOCI<4:0>: FIFO Message Index bits
(1)
TXEN = 1 (FIFO configured as a transmit buffer):
A read of this register will return an index to the message that the FIFO will next attempt to transmit.
TXEN =
0 (FIFO configured as a receive buffer):
A read of this register will return an index to the message that the FIFO will use to save the next
message.
bit 7 TXABT: Message Aborted Status bit
(3)
1 = Message was aborted
0 = Message completed successfully
bit 6 TXLARB: Message Lost Arbitration Status bit
(2)
1 = Message lost arbitration while being sent
0 = Message did not lose arbitration while being sent
bit 5 TXERR: Error Detected During Transmission bit
(2)
1 = A bus error occurred while the message was being sent
0 = A bus error did not occur while the message was being sent
bit 4 TXATIF: Transmit Attempts Exhausted Interrupt Pending bit
TXEN =
1 (FIFO configured as a transmit buffer):
1 = Interrupt is pending
0 = Interrupt is not pending
TXEN =
0 (FIFO configured as a receive buffer):
Unused, reads as ‘0’.
bit 3 RXOVIF: Receive FIFO Overflow Interrupt Flag bit
TXEN = 1 (FIFO configured as a transmit buffer):
Unused, reads as ‘0’.
TXEN = 0 (FIFO configured as a receive buffer):
1 = Overflow event has occurred
0 = No overflow event occurred
Note 1: FIFOCI<4:0> gives a zero-indexed value to the message in the FIFO. If the FIFO is 4 messages deep
(FSIZE = 3), FIFOCIx will take on a value of 0 to 3, depending on the state of the FIFO.
2: This bit is updated when a message completes (or aborts) or when the FIFO is reset.
3: This bit is reset on any read of this register or when the TXQ is reset.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 36 2018 Microchip Technology Inc.
bit 2 TFERFFIF: Transmit/Receive FIFO Empty/Full Interrupt Flag bit
TXEN =
1 (FIFO configured as a transmit FIFO):
Transmit FIFO Empty Interrupt Flag
1 = FIFO is empty
0 = FIFO is not empty, at least 1 message is queued to be transmitted
TXEN =
0 (FIFO configured as a receive FIFO):
Receive FIFO Full Interrupt Flag
1 = FIFO is full
0 = FIFO is not full
bit 1 TFHRFHIF: Transmit/Receive FIFO Half Empty/Half Full Interrupt Flag bit
TXEN = 1 (FIFO configured as a transmit FIFO):
Transmit FIFO Half Empty Interrupt Flag
1 = FIFO is half full
0 = FIFO is > half full
TXEN =
0 (FIFO configured as a receive FIFO):
Receive FIFO Half Full Interrupt Flag
1 = FIFO is half full
0 = FIFO is < half full
bit 0 TFNRFNIF: Transmit/Receive FIFO Not Full/Not Empty Interrupt Flag bit
TXEN = 1 (FIFO configured as a transmit FIFO):
Transmit FIFO Not Full Interrupt Flag
1 = FIFO is not full
0 = FIFO is full
TXEN =
0 (FIFO configured as a receive FIFO):
Receive FIFO Not Empty Interrupt Flag
1 = FIFO is not empty, has at least 1 message
0 = FIFO is empty
Register 3-34: C1FIFOSTAx: CAN FIFO Status Register x (x = 1 to 31) (Continued)
Note 1: FIFOCI<4:0> gives a zero-indexed value to the message in the FIFO. If the FIFO is 4 messages deep
(FSIZE = 3), FIFOCIx will take on a value of 0 to 3, depending on the state of the FIFO.
2: This bit is updated when a message completes (or aborts) or when the FIFO is reset.
3: This bit is reset on any read of this register or when the TXQ is reset.

2018 Microchip Technology Inc. DS70005340A-page 37
CAN FD Protocol Module
Register 3-35: C1TEFCONH: CAN Transmit Event FIFO Control Register High
U-0 U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— — —FSIZE<4:0>
(1)
bit 15 bit 8
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-13 Unimplemented: Read as ‘0’
bit 12-8 FSIZE<4:0>: FIFO Size bits
(1)
11111 = FIFO is 32 messages deep
...
00010 = FIFO is 3 messages deep
00001 = FIFO is 2 messages deep
00000 = FIFO is 1 message deep
bit 7-0 Unimplemented: Read as ‘0’
Note 1: These bits can only be modified in Configuration mode (OPMOD<2:0> = 100).

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 38 2018 Microchip Technology Inc.
Register 3-36: C1TEFCONL: CAN Transmit Event FIFO Control Register Low
U-0 U-0 U-0 U-0 U-0 S/HC-1 U-0 S/HC-0
— — — — — FRESET —UINC
bit 15 bit 8
U-0 U-0 R/W-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0
— — TEFTSEN
(1)
— TEFOVIE TEFFIE TEFHIE TEFNEIE
bit 7 bit 0
Legend: S = Settable bit HC = Hardware Clearable bit
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-11 Unimplemented: Read as ‘0’
bit 10 FRESET: FIFO Reset bit
1 = FIFO will be reset when bit is set, cleared by hardware when FIFO is reset; the user should poll
whether this bit is clear before taking any action
0 = No effect
bit 9 Unimplemented: Read as ‘0’
bit 8 UINC: Increment Tail bit
1 = When this bit is set, the FIFO tail will increment by a single message
0 = FIFO tail will not increment
bit 7-6 Unimplemented: Read as ‘0’
bit 5 TEFTSEN: Transmit Event FIFO Timestamp Enable bit
(1)
1 = Timestamps elements in TEF
0 = Does not timestamp elements in TEF
bit 4 Unimplemented: Read as ‘0’
bit 3 TEFOVIE: Transmit Event FIFO Overflow Interrupt Enable bit
1 = Interrupt is enabled for overflow event
0 = Interrupt is disabled for overflow event
bit 2 TEFFIE: Transmit Event FIFO Full Interrupt Enable bit
1 = Interrupt is enabled for FIFO full
0 = Interrupt is disabled for FIFO full
bit 1 TEFHIE: Transmit Event FIFO Half Full Interrupt Enable bit
1 = Interrupt is enabled for FIFO half full
0 = Interrupt is disabled for FIFO half full
bit 0 TEFNEIE: Transmit Event FIFO Not Empty Interrupt Enable bit
1 = Interrupt is enabled for FIFO not empty
0 = Interrupt is disabled for FIFO not empty
Note 1: These bits can only be modified in Configuration mode (OPMOD<2:0> = 100).

2018 Microchip Technology Inc. DS70005340A-page 39
CAN FD Protocol Module
Register 3-37: C1TEFSTA: CAN Transmit Event FIFO Status Register
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 15 bit 8
U-0 U-0 U-0 U-0 HS/C R-0 R-0 R-0
— — — — TEFOVIF TEFFIF
(1)
TEFHIF
(1)
TEFNEIF
(1)
bit 7 bit 0
Legend: HS = Hardware Settable bit C = Clearable bit
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-4 Unimplemented: Read as ‘0’
bit 3 TEFOVIF: Transmit Event FIFO Overflow Interrupt Flag bit
1 = Overflow event has occurred
0 = No overflow event has occurred
bit 2 TEFFIF: Transmit Event FIFO Full Interrupt Flag bit
(1)
1 = FIFO is full
0 = FIFO is not full
bit 1 TEFHIF: Transmit Event FIFO Half Full Interrupt Flag bit
(1)
1 = FIFO is half full
0 = FIFO is < half full
bit 0 TEFNEIF: Transmit Event FIFO Not Empty Interrupt Flag bit
(1)
1 = FIFO is not empty
0 = FIFO is empty
Note 1: These bits are read-only and reflect the status of the FIFO.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 40 2018 Microchip Technology Inc.
Register 3-38: C1FIFOUAxH: CAN FIFO User Address Register x (x = 1 to 31) High
(1)
R-x R-x R-x R-x R-x R-x R-x R-x
FIFOUA<31:24>
bit 15 bit 8
R-x R-x R-x R-x R-x R-x R-x R-x
FIFOUA<23:16>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 FIFOUA<31:16>: FIFO User Address bits
TXEN =
1 (FIFO configured as a transmit buffer):
A read of this register will return the address where the next message is to be written (FIFO head).
TXEN = 0 (FIFO configured as a receive buffer):
A read of this register will return the address where the next message is to be read (FIFO tail).
Note 1: This register is not ensured to read correctly in Configuration mode and should only be accessed when the
module is not in Configuration mode.
Register 3-39: C1FIFOUAxL: CAN FIFO User Address Register x (x = 1 to 31) Low
(1)
R-x R-x R-x R-x R-x R-x R-x R-x
FIFOUA<15:8>
bit 15 bit 8
R-x R-x R-x R-x R-x R-x R-x R-x
FIFOUA<7:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 FIFOUA<15:0>: FIFO User Address bits
TXEN =
1 (FIFO configured as a transmit buffer):
A read of this register will return the address where the next message is to be written (FIFO head).
TXEN = 0 (FIFO configured as a receive buffer):
A read of this register will return the address where the next message is to be read (FIFO tail).
Note 1: This register is not ensured to read correctly in Configuration mode and should only be accessed when the
module is not in Configuration mode.

2018 Microchip Technology Inc. DS70005340A-page 41
CAN FD Protocol Module
Register 3-40: C1TEFUAH: CAN Transmit Event FIFO User Address Register High
(1)
R-x R-x R-x R-x R-x R-x R-x R-x
TEFUA<31:24>
bit 15 bit 8
R-x R-x R-x R-x R-x R-x R-x R-x
TEFUA<23:16>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 TEFUA<31:16>: Transmit Event FIFO User Address bits
A read of this register will return the address where the next event is to be read (FIFO tail).
Note 1: This register is not ensured to read correctly in Configuration mode and should only be accessed when the
module is not in Configuration mode.
Register 3-41: C1TEFUAL: CAN Transmit Event FIFO User Address Register Low
(1)
R-x R-x R-x R-x R-x R-x R-x R-x
TEFUA<15:8>
bit 15 bit 8
R-x R-x R-x R-x R-x R-x R-x R-x
TEFUA<7:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 TEFUA<15:0>: Transmit Event FIFO User Address bits
A read of this register will return the address where the next event is to be read (FIFO tail).
Note 1: This register is not ensured to read correctly in Configuration mode and should only be accessed when the
module is not in Configuration mode.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 42 2018 Microchip Technology Inc.
Register 3-42: C1TXQUAH: CAN Transmit Queue User Address Register High
(1)
R-x R-x R-x R-x R-x R-x R-x R-x
TXQUA<31:24>
bit 15 bit 8
R-x R-x R-x R-x R-x R-x R-x R-x
TXQUA<23:16>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 TXQUA<31:16>: TXQ User Address bits
A read of this register will return the address where the next message is to be written (TXQ head).
Note 1: This register is not ensured to read correctly in Configuration mode and should only be accessed when the
module is not in Configuration mode.
Register 3-43: C1TXQUAL: CAN Transmit Queue User Address Register Low
(1)
R-x R-x R-x R-x R-x R-x R-x R-x
TXQUA<15:8>
bit 15 bit 8
R-x R-x R-x R-x R-x R-x R-x R-x
TXQUA<7:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 TXQUA<15:0>: Transmit Queue User Address bits
A read of this register will return the address where the next message is to be written (TXQ head).
Note 1: This register is not ensured to read correctly in Configuration mode and should only be accessed when the
module is not in Configuration mode.

2018 Microchip Technology Inc. DS70005340A-page 43
CAN FD Protocol Module
Register 3-44: C1TRECH: CAN Transmit/Receive Error Count Register High
U-0 U-0 U-0 U-0 U-0 U-0 U-0 U-0
— — — — — — — —
bit 15 bit 8
U-0 U-0 R-1 R-0 R-0 R-0 R-0 R-0
— — TXBO TXBP RXBP TXWARN RXWARN EWARN
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-6 Unimplemented: Read as ‘0’
bit 5 TXBO: Transmitter in Error State Bus Off bit (TERRCNT<7:0> > 255)
In Configuration mode, TXBO is set since the module is not on the bus.
bit 4 TXBP: Transmitter in Error State Bus Passive bit (TERRCNT<7:0> > 127)
bit 3 RXBP: Receiver in Error State Bus Passive bit (RERRCNT<7:0> > 127)
bit 2 TXWARN: Transmitter in Error State Warning bit (128 > TERRCNT<7:0> > 95)
bit 1 RXWARN: Receiver in Error State Warning bit (128 > RERRCNT<7:0> > 95)
bit 0 EWARN: Transmitter or Receiver is in Error State Warning bit
Register 3-45: C1TRECL: CAN Transmit/Receive Error Count Register Low
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
TERRCNT<7:0>
bit 15 bit 8
R-0 R-0 R-0 R-0 R-0 R-0 R-0 R-0
RERRCNT<7:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-8 TERRCNT<7:0>: Transmit Error Counter bits
bit 7-0 RERRCNT<7:0>: Receive Error Counter bits

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 44 2018 Microchip Technology Inc.
Register 3-46: C1BDIAG0H: CAN Bus Diagnostics Register 0 High
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
DTERRCNT<7:0>
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
DRERRCNT<7:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-8 DTERRCNT<7:0>: Data Bit Rate Transmit Error Counter bits
bit 7-0 DRERRCNT<7:0>: Data Bit Rate Receive Error Counter bits
Register 3-47: C1BDIAG0L: CAN Bus Diagnostics Register 0 Low
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
NTERRCNT<7:0>
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
NRERRCNT<7:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-8 NTERRCNT<7:0>: Nominal Bit Rate Transmit Error Counter bits
bit 7-0 NRERRCNT<7:0>: Nominal Bit Rate Receive Error Counter bits
2018 Microchip Technology Inc. DS70005340A-page 45
CAN FD Protocol Module
Register 3-48: C1BDIAG1H: CAN Bus Diagnostics Register 1 High
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 U-0 R/W-0 R/W-0
DLCMM ESI DCRCERR DSTUFERR DFORMERR
— DBIT1ERR DBIT0ERR
bit 15 bit 8
R/W-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
TXBOERR
— NCRCERR NSTUFERR NFORMERR NACKERR NBIT1ERR NBIT0ERR
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15 DLCMM: DLC Mismatch bit
During a transmission or reception, the specified DLC is larger than the PLSIZEx of the FIFO element.
bit 14 ESI: ESI Flag of Received CAN FD Message Set bit
bit 13 DCRCERR: Same as for Nominal Bit Rate
bit 12 DSTUFERR: Same as for Nominal Bit Rate
bit 11 DFORMERR: Same as for Nominal Bit Rate
bit 10 Unimplemented: Read as ‘0’
bit 9 DBIT1ERR: Same as for Nominal Bit Rate
bit 8 DBIT0ERR: Same as for Nominal Bit Rate
bit 7 TXBOERR: Device Went to Bus Off bit (and auto-recovered)
bit 6 Unimplemented: Read as ‘0’
bit 5 NCRCERR: Received Message with CRC Incorrect Checksum bit
The CRC checksum of a received message was incorrect. The CRC of an incoming message does not
match with the CRC calculated from the received data.
bit 4 NSTUFERR: Received Message with Illegal Sequence bit
More than 5 equal bits in a sequence have occurred in a part of a received message where this is not
allowed.
bit 3 NFORMERR: Received Frame Fixed Format bit
A fixed format part of a received frame has the wrong format.
bit 2 NACKERR: Transmitted Message Not Acknowledged bit
Transmitted message was not Acknowledged.
bit 1 NBIT1ERR: Transmitted Message Recessive Level bit
During the transmission of a message (with the exception of the arbitration field), the device wanted to
send a recessive level (bit of logical value ‘1’), but the monitored bus value was dominant.
bit 0 NBIT0ERR: Transmitted Message Dominant Level bit
During the transmission of a message (or Acknowledge bit, or active error flag or overload flag), the
device wanted to send a dominant level (data or identifier bit of logical value ‘0’), but the monitored bus
value was recessive. During bus off recovery, this status is set each time a sequence of 11 recessive
bits has been monitored. This enables the CPU to monitor the proceeding of the bus off recovery
sequence (indicating the bus is not stuck at dominant or continuously disturbed).
dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 46 2018 Microchip Technology Inc.
Register 3-49: C1BDIAG1L: CAN Bus Diagnostics Register 1 Low
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
EFMSGCNT<15:8>
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
EFMSGCNT<7:0>
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-0 EFMSGCNT<15:0>: Error-Free Message Counter bits

2018 Microchip Technology Inc. DS70005340A-page 47
CAN FD Protocol Module
Register 3-50: C1FLTCONxH: CAN Filter Control Register x High (x = 0 to 7; c = 2, 6, 10, 14, 18, 22, 26, 30;
d = 3, 7, 11, 15, 19, 23, 27, 31)
R/W-0 U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
FLTENd
— — FdBP4 FdBP3 FdBP2 FdBP1 FdBP0
bit 15 bit 8
R/W-0 U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
FLTENc
— — FcBP4 FcBP3 FcBP2 FcBP1 FcBP0
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15 FLTENd: Enable Filter d to Accept Messages bit
1 = Filter is enabled
0 = Filter is disabled
bit 14-13 Unimplemented: Read as ‘0’
bit 12-8 FdBP<4:0>: Pointer to Object When Filter d Hits bits
11111 = Message matching filter is stored in Object 31
11110 = Message matching filter is stored in Object 30
...
00010 = Message matching filter is stored in Object 2
00001 = Message matching filter is stored in Object 1
00000 = Reserved; Object 0 is the TX Queue and cannot receive messages
bit 7 FLTENc: Enable Filter c to Accept Messages bit
1 = Filter is enabled
0 = Filter is disabled
bit 6-5 Unimplemented: Read as ‘0’
bit 4-0 FcBP<4:0>: Pointer to Object When Filter c Hits bits
11111 = Message matching filter is stored in Object 31
11110 = Message matching filter is stored in Object 30
...
00010 = Message matching filter is stored in Object 2
00001 = Message matching filter is stored in Object 1
00000 = Reserved; Object 0 is the TX Queue and cannot receive messages

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 48 2018 Microchip Technology Inc.
Register 3-51: C1FLTCONxL: CAN Filter Control Register x Low (x = 0 to 7; a = 0, 4, 8, 12, 16, 20, 24, 28;
b = 1, 5, 9, 13, 17, 21, 25, 29)
R/W-0 U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
FLTENb
— — FbBP4 FbBP3 FbBP2 FbBP1 FbBP0
bit 15 bit 8
R/W-0 U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
FLTENa
— — FaBP4 FaBP3 FaBP2 FaBP1 FaBP0
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15 FLTENb: Enable Filter b to Accept Messages bit
1 = Filter is enabled
0 = Filter is disabled
bit 14-13 Unimplemented: Read as ‘0’
bit 12-8 FbBP<4:0>: Pointer to Object When Filter b Hits bits
11111 = Message matching filter is stored in Object 31
11110 = Message matching filter is stored in Object 30
...
00010 = Message matching filter is stored in Object 2
00001 = Message matching filter is stored in Object 1
00000 = Reserved; Object 0 is the TX Queue and cannot receive messages
bit 7 FLTENa: Enable Filter a to Accept Messages bit
1 = Filter is enabled
0 = Filter is disabled
bit 6-5 Unimplemented: Read as ‘0’
bit 4-0 FaBP<4:0>: Pointer to Object When Filter a Hits bits
11111 = Message matching filter is stored in Object 31
11110 = Message matching filter is stored in Object 30
...
00010 = Message matching filter is stored in Object 2
00001 = Message matching filter is stored in Object 1
00000 = Reserved; Object 0 is the TX Queue and cannot receive messages

2018 Microchip Technology Inc. DS70005340A-page 49
CAN FD Protocol Module
Register 3-52: C1FLTOBJxH: CAN Filter Object Register x High (x = 0 to 31)
U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— EXIDE SID11 EID17 EID16 EID15 EID14 EID13
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
EID12 EID11 EID10 EID9 EID8 EID7 EID6 EID5
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15 Unimplemented: Read as ‘0’
bit 14 EXIDE: Extended Identifier Enable bit
If MIDE =
1:
1 = Matches only messages with Extended Identifier addresses
0 = Matches only messages with Standard Identifier addresses
bit 13 SID11: Standard Identifier Filter bit
bit 12-0 EID<17:5>: Extended Identifier Filter bits
In DeviceNet™ mode, these are the filter bits for the first 2 data bytes.
Register 3-53: C1FLTOBJxL: CAN Filter Object Register x Low (x = 0 to 31)
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
EID4 EID3 EID2 EID1 EID0 SID10 SID9 SID8
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
SID7 SID6 SID5 SID4 SID3 SID2 SID1 SID0
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-11 EID<4:0>: Extended Identifier Filter bits
In DeviceNet™ mode, these are the filter bits for the first 2 data bytes.
bit 10-0 SID<10:0>: Standard Identifier Filter bits

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 50 2018 Microchip Technology Inc.
Register 3-54: C1MASKxH: CAN Mask Register x High (x = 0 to 31)
U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— MIDE MSID11 MEID17 MEID16 MEID15 MEID14 MEID13
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
MEID12 MEID11 MEID10 MEID9 MEID8 MEID7 MEID6 MEID5
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15 Unimplemented: Read as ‘0’
bit 14 MIDE: Identifier Receive Mode bit
1 = Matches only message types (standard or extended address) that correspond to the EXIDE bit in
the filter
0 = Matches either standard or extended address message if filters match
(i.e., if (Filter SID) = (Message SID) or if (Filter SID/EID) = (Message SID/EID))
bit 13 MSID11: Standard Identifier Mask bit
bit 12-0 MEID<17:5>: Extended Identifier Mask bits
In DeviceNet™ mode, these are the mask bits for the first 2 data bytes.
Register 3-55: C1MASKxL: CAN Mask Register x Low (x = 0 to 31)
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
MEID4 MEID3 MEID2 MEID1 MEID0 MSID10 MSID9 MSID8
bit 15 bit 8
R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
MSID7 MSID6 MSID5 MSID4 MSID3 MSID2 MSID1 MSID0
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15-11 MEID<4:0>: Extended Identifier Mask bits
In DeviceNet™ mode, these are the mask bits for the first 2 data bytes.
bit 10-0 MSID<10:0>: Standard Identifier Mask bits

2018 Microchip Technology Inc. DS70005340A-page 51
CAN FD Protocol Module
4.0 MODES OF OPERATION
The CAN FD Protocol Module has eight modes of operations:
• Configuration mode
• Normal CAN FD mode: Supports mixing of CAN FD and CAN 2.0 messages
• Normal CAN 2.0 mode: Will generate error frames while receiving CAN FD messages. The
FDF bit is forced to zero and only CAN 2.0 frames are sent, even if the FDF bit is set in the
transmit message object.
• Disable mode
• Listen Only mode
• Restricted Operation mode
• Internal Loopback mode
• External Loopback mode
The modes of operations can be grouped into four main groups: Configuration, Normal, Sleep
and Debug (see Figure 4-1).
4.1 Mode Change
Figure 4-1 illustrates the possible mode transitions. New modes of operation are requested by
writing to the REQOP<2:0> (C1CONH<10:8>) bits. The modes of operations do not change
immediately. The modes will only change when the bus is Idle.
The current operating mode is indicated in the OPMOD<2:0> (C1CONH<7:5>) bits. The
application can enable an interrupt on an OPMODx change or poll the OPMODx bits.
4.1.1 CHANGING BETWEEN NORMAL MODES
Directly changing between Normal modes is not allowed. The Configuration mode must be
selected before a new Normal mode can be selected.
4.1.2 CHANGING BETWEEN DEBUG MODES
Directly changing between Debug modes is not allowed. The Configuration mode must be
selected before a new Debug mode can be selected.
4.1.3 EXITING NORMAL MODE
The device will transition to Configuration or Sleep mode only after the current message is
transmitted.
4.1.4 ENTERING AND EXITING DISABLE MODE
The CAN FD Protocol Module enters Disable mode after a Sleep mode request. The device
exits Disable mode after a mode request.
If WAKIE is set, a dominant edge on CxRX will generate an interrupt. The CPU has to enable
the CAN module by requesting a Normal mode.
4.1.5 BUS INTEGRATING MODE
The CAN FD Protocol Module integrates to the bus, according to the ISO11898-1:2015
specifications (eleven consecutive recessive bits), under the following conditions:
• Change from Configuration mode to one of the Normal modes or Debug modes
• Change from Disable mode to one of the Normal modes

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 52 2018 Microchip Technology Inc.
Figure 4-1: CAN FD Modes of Operation
REQOPx = Restricted
and Bus Idle
No
Yes
REQOPx =
“Normal”
REQOP=Listen Only
And Bus Idle
REQOPx = Config
(and Bus Idle)
REQOP=Restricted
And Bus Idle
Recessive bit = 1
Received and PXEDIS = 0
Wait for
Bus Idle
Wait for
128 Idle Conditions
TXBO
System Error
REQOPx = “Normal”
REQOPx = Config
(and Bus Idle)
REQOPx = Listen Only
and Bus Idle
REQOPx = Config
and Bus Idle
REQOPx = Loopback Int/Ext
and Bus Idle (Integrating)
WAKIF or OSCDIS = 0
REQOPx = Sleep
and Bus Idle
REQOPx = Config
and Bus Idle
REQOPx = “Normal”
and Bus Idle
(Integrating)
POR
Configuration
Mode
Sleep Mode
Clock Off
CxTX Recessive
“Normal”
Modes
RX and TX
Loopback
Modes
Listen Only
Mode
RX Only
TX Pin High
TXREQ Ignored
Bus Off
Clear All TXREQx
bits (Reset TX
FIFOs/TXQ)
Protocol
Exception Event
No TX
Restricted Operation
Mode
RX
TX: Only ACK,
TXREQx Ignored
c
SERRLOM = 1?
Normal FD
Mode
Normal 2.0
Mode
External/Internal
Loopback
Mode
Listen Only
Mode
“Normal” Modes “Debug” Modes
Restricted
Operation
Mode

2018 Microchip Technology Inc. DS70005340A-page 53
CAN FD Protocol Module
4.2 Configuration Mode
After Reset, the CAN FD Protocol Module is in Configuration mode. The error counters are
cleared and all registers contain the Reset values.
The CAN FD Protocol Module has to be initialized before activation. This is only possible when
the module is in Configuration mode, OPMOD<2:0> = 100. The Configuration mode is
requested by setting REQOP<2:0> = 100.
The CAN FD Protocol Module will protect the user from accidentally violating the CAN protocol
through programming errors. The following registers and bit fields can only be programmed
during Configuration mode:
• C1CONL: WAKFIL, CLKSEL, PXEDIS, ISOCRCEN
• C1CONH: TXQEN, STEF, SERRLOM, ESIGM, RTXAT
• C1NBTCFGH/L, C1DBTCFGH/L, C1TDCH/L
• C1TXQCONH: PLSIZE<2:0>, FSIZE<4:0>
• C1TXQCONL
• C1FIFOCONxL: TXEN, RXTSEN
• C1FIFOCONxH: PLSIZE<2:0>, FSIZE<4:0>
• C1TEFCONL: TEFTSEN
• C1TEFCONH: FSIZE<4:0>
• C1FIFOBAL/H
The CAN FD Protocol Module is not allowed to enter Configuration mode during transmission or
reception to prevent the module from causing errors on the CAN bus. The following registers
are reset when exiting Configuration mode:
• C1TRECH/L
•C1BDIAG0H/L
•C1BDIAG1H/L
In Configuration mode, FRESET is set in the C1FIFOCONxL, C1TXQCONL and C1TEFCONL
registers, and all FIFOs and the TXQ are reset.
4.3 Normal Modes
4.3.1 NORMAL CAN FD MODE
Once the device is configured, Normal Operation mode can be requested by setting
REQOP<2:0> = 000.
In this mode, the device will be on the CAN bus. It can transmit and receive messages in CAN
FD mode, Bit Rate Switching can be enabled, and up to 64 data bytes can be transmitted and
received.
4.3.2 NORMAL CAN 2.0 MODE
The Normal CAN 2.0 Operation mode can be requested by setting REQOP<2:0> = 110.
In this mode, the device will be on the CAN bus. This is a the Classic CAN 2.0 mode. The
module will not receive CAN FD frames. It might send error frames if CAN FD frames are
detected on the bus. The FDF, BRS and ESI bits in the TX objects will be ignored and
transmitted as ‘0’.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 54 2018 Microchip Technology Inc.
4.4 Disable Mode
Disable mode is similar to Configuration mode, except the error counters are not reset. Disable
mode is requested by setting REQOP<2:0> = 001.
The CAN module will not be allowed to enter Disable mode while a transmission or reception is
taking place to prevent causing errors on the CAN bus. The module will enter Disable mode when
the current message completes.
The OPMODx bits indicate whether the module successfully entered Disable mode. The application
software should use this bit field as a handshake indication for the Disable mode request.
The CxTX pin will stay in the recessive state while the module is in Disable mode to prevent
inadvertent CAN bus errors.
4.5 Debug Modes
4.5.1 LISTEN ONLY MODE
Listen Only mode is a variant of Normal CAN FD Operation mode. If the Listen Only mode is
activated, the module on the CAN bus is passive. It will receive messages, but it will not transmit
any bits. TXREQx bits will be ignored. No error flags or Acknowledge signals are sent. The error
counters are deactivated in this state. The Listen Only mode can be used for detecting the baud
rate on the CAN bus. It is necessary that there are at least two further nodes that communicate
with each other. The baud rate can be detected empirically by testing different values until a
message is received successfully. This mode is also useful for monitoring the CAN bus without
influencing it.
4.5.2 RESTRICTED OPERATION MODE
In Restricted Operation mode, the node is able to receive data and remote frames, and to
Acknowledge valid frames, but it does not send data frames, remote frames, error frames or
overload frames. In case of an error or overload condition, it does not send dominant bits; instead,
it waits for the bus to enter the Idle condition to resynchronize itself to the CAN communication.
The error counters are not incremented.
4.5.3 LOOPBACK MODE
Loopback mode is a variant of Normal CAN FD Operation mode. This mode will allow internal
transmission of messages from the transmit FIFOs to the receive FIFOs. The module does not
require an external Acknowledge from the bus. No messages can be received from the bus,
because the CxRX pin is disconnected.
4.5.3.1 Internal Loopback Mode
The transmit signal is internally connected to receive and the CxTX pin is driven high.
4.5.3.2 External Loopback Mode
The transmit signal is internally connected to receive and transmit messages can be monitored
on the CxTX pin.

2018 Microchip Technology Inc. DS70005340A-page 55
CAN FD Protocol Module
4.6 Low-Power Modes
4.6.1 SLEEP MODE
In the CAN module, special conditions need to be met for Sleep mode. The module must first be
switched to Disable mode by setting REQOPx = 001. When OPMODx = 001, indicating Disable
mode has been achieved, the CAN FD Protocol Module enters Sleep mode after a Sleep mode
request.
In Sleep mode, the register contents do not change, so the OPMODx bits do not change. At the
end of Sleep, the module will continue in the mode specified by the OPMODx bits previous to
Sleep mode (which should be Disable mode, OPMODx = 001).
If the user executes a SLEEP instruction without switching to Disable mode, the module
assumes a clock is available to read/write from RAM.
Since the system clock input is not available in Sleep mode, the CAN module cannot run as it
requires a system clock to transmit or receive. Also, the FIFO is in system RAM, which has no
clock in Sleep mode.
Recommended steps:
1. Write the REQOP<2:0> bits to ‘001’; the module will enter Disable mode.
2. Poll the OPMOD<2:0> bits to verify whether they are ‘001’, which indicates that the
module has successfully entered Disable mode.
3. Execute the SLEEP instruction.
4.6.2 IDLE MODE
The system can be set to run in a lower power mode, called Idle mode. When the device is in
Idle mode, the CPU is disabled and only select peripherals are active.
Based on the configuration of the CAN SIDL bit, the module can either be in or out of Idle mode:
•If SIDL = 0, the module continues operation in Idle mode. If the module generates an
interrupt while in Idle mode, the interrupt may generate a wake-up event.
•If SIDL=1, the module stops when the device is in Idle mode. The module performs the
same procedures when stopped in Idle mode as it does in Disable mode and the same
requirements apply.
The user should ensure that the module is not active when the CPU transitions to Idle mode
with SIDL = 1. To protect the CAN bus system from fatal consequences due to violation of this
rule, the module will drive the TX pin into the recessive state while stopped in Idle mode.
If the CAN SIDL bit is set, the recommended procedure is to bring the module into Disable
mode before the device is placed in Idle mode.
4.6.3 WAKE-UP FROM SLEEP
Figure 4-2 depicts how the CAN module will execute the SLEEP instruction and how the module
wakes up on bus activity. Upon a wake-up from Sleep mode, the WAKIF flag is set.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 56 2018 Microchip Technology Inc.
Figure 4-2:
Processor Sleep and CAN Bus Wake-up Interrup
t
The module will monitor the CAN receive line for activity while the module is Sleeping. The
device will generate a wake-up interrupt on the falling edges of CxRX if WAKIE is enabled.
The device will exit Sleep mode after a new mode request or a negative edge on CxRX.
The module will be in Sleep mode if either of the following is true:
• The system is in Sleep mode followed by Disable mode
• The system is in Idle mode with SIDL = 1
T
OST
Processor in
Sleep
2 3 4 5
– Processor executes SLEEP (PWRSAV #0) instruction.
– SOF of message wakes up processor. Oscillator start time begins. CAN message is lost. WAKIF bit is set.
– Processor completes oscillator start time. Processor resumes program or interrupt, based on GIE bits.
accepting CAN bus activity. CAN message is lost.
– Module detects 11 recessive bits. Module will begin to receive messages and transmits any pending messages.
OSC1
CAN B
US
Disabled
001
001000
000 000
000
Sleep
WAKIF
WAKIE
1
– Processor requests and receives Module Disable mode. Wake-up interrupt is enabled.
Processor requests Normal Operating mode. Module waits for 11 recessive bits before
1
2
3
4
5
REQOP<2:0>
OPMOD<2:0>
CAN Module
Note 1: If the module is in Sleep mode, the module generates an interrupt if the WAKIE bit
(C1INTH<14>) is set and bus activity is detected. Due to delays in starting up the
oscillator and CPU, the message activity that caused the wake-up will be lost.
2: The module can be programmed to apply a low-pass filter function to the CAN
receive input line while in Disable, Sleep or Idle mode. This feature can be used to
protect the module from wake-up due to short glitches on the CAN bus lines. The
WAKFIL bit (C1CONL<8>) enables or disables the filter while the module is in Sleep.

2018 Microchip Technology Inc. DS70005340A-page 57
CAN FD Protocol Module
5.0 CONFIGURATION
5.1 Clock Configuration
The sample point of all nodes in a CAN FD network should be at the same position. Hence, it is
recommended to use the same clock frequency and bit time settings for all nodes. Therefore, a
SYSCLK of 80 MHz, 40 MHz, 20 MHz or 10 MHz is recommended
The CLKSEL bit allows the selection of the clock source to the CAN FD module.
• If CLKSEL = 1, then the auxiliary clock will be selected as a clock source
• If CLKSEL = 0, then the clock from the CAN clock generator will be selected
The following register is used to configure the CAN clock generator.
Register 5-1: CANCLKCON: CAN Clock Control Register
(1)
R/W-0 U-0 U-0 U-0 R/W-0 R/W-0 R/W-0 R/W-0
CANCLKEN
— — — CANCLKSEL<3:0>
(1)
bit 15 bit 8
U-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0 R/W-0
— CANCLKDIV<6:0>
(2,3)
bit 7 bit 0
Legend:
R = Readable bit W = Writable bit U = Unimplemented bit, read as ‘0’
-n = Value at POR ‘1’ = Bit is set ‘0’ = Bit is cleared x = Bit is unknown
bit 15 CANCLKEN: CAN Clock Generator Enable bit
1 = CAN clock generation circuitry is enabled
0 = CAN clock generation circuitry is disabled
bit 14-12 Unimplemented: Read as ‘0’
bit 11-8 CANCLKSEL<3:0>: Can Clock Source Select bits
(1)
1011-1111 = Reserved (no clock selected)
1010 = AF
VCO
/4 clock
1001 = AF
VCO
/3 clock
1000 = AF
VCO
/2 clock
0111 = AF
PLLVCO
clock
0110 = Auxiliary clock
0101 = VCO/4 clock
0100 = VCO/3 clock
0011 = VCO/2 clock
0010 = PLLDIV clock
0001 = VCO clock
0000 = 0 (No clock selected)
bit 7 Unimplemented: Read as ‘0’
bit 6-0 CANCLKDIV<6:0>: CAN Clock Divider Select bits
(2,3)
1111111 = Divide by 128
•••
0000010 = Divide by 3
0000001 = Divide by 2
0000000 = Divide by 1
Note 1: The user must ensure the input clock source is 640 MHz or less. Operation with input reference frequency
above 640 MHz will result in unpredictable behavior.
2: The CANCLKDIVx divider value must not be changed during CAN module operation.
3: The user must ensure the maximum clock output frequency of the divider is 80 MHz or less.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 58 2018 Microchip Technology Inc.
5.2 CAN Configuration
The C1CONH/L registers contain several bits that can only be configured in Configuration mode.
5.2.1 ISO CRC ENABLE
The module supports ISO CRC (according to ISO11898-1:2015) and non-ISO CRC (see
Section 2.1 “ISO vs. NON-ISO CRC”). ISO CRC is enabled by setting the ISOCRCEN bit.
5.2.2 PROTOCOL EXCEPTION DISABLE
The negative edge between the FDF bit and the “reserved bit” in CAN FD frames is important
for the calculation of the transceiver delay, and for hard synchronization. Therefore, if the
“reserved bit” following the FDF bit is detected recessive, the CAN FD Protocol Module will treat
this as a form error. This is called, “Protocol Exception Event Detection Disabled”, and is
configured by setting the PXEDIS bit.
The Protocol Exception Event Detection Disabled can be enabled by clearing the PXEDIS bit. As
a reaction to the protocol exception event, the error counters are not changed, hard
synchronization is enabled, the module sends recessive bits and enters the bus integration state.
5.2.3 WAKE-UP FILTER – WFT<1:0>
The WAKFIL bit is used to enable/disable the low-pass filter on the CxRX pin. The filter is only
active during Sleep mode. The WFTx bits allow the configuration of different filter times.
5.2.4 RESTRICTION OF TRANSMISSION ATTEMPTS
ISO11898-1:2015 requires that frames that lost arbitration and are not Acknowledged, or are
destroyed by errors, are automatically retransmitted. Optionally, the number of retransmission
attempts can be limited.
When the RTXAT bit is set, retransmission attempts can be limited using the TXAT<1:0> bits in
the FIFO Control registers. If the RTXAT bit is clear, then the TXATx bits in the FIFO Control
register are ignored and the retransmission attempts are unlimited.
5.2.5 ERROR STATE INDICATOR (ESI) IN GATEWAY MODE
Normally, the ESI bit in a transmitted message reflects the error status of the CAN FD Protocol
Module. ESI is transmitted recessive when the module is error passive. In case the module is
used in a gateway application, there will be situations where the ESI bit in the message should
be transmitted recessive, even though the gateway module is error active. This can be
configured by setting the ESIGM bit.
5.2.6 MODE SELECTION IN CASE OF SYSTEM ERROR
The SERRLOM bit selects which mode the module will transition to in case of a system error. The
module can either transition to Restricted Operation mode or Listen Only mode.
5.2.7 RESERVING MESSAGE MEMORY FOR TXQ AND TEF
Setting the TXQEN bit will reserve RAM for the TXQ. If the TXQEN bit is cleared, then the TXQ
cannot be used.
Setting the STEF bit will reserve RAM for the TEF and all transmitted messages will be stored in
the TEF.

2018 Microchip Technology Inc. DS70005340A-page 59
CAN FD Protocol Module
5.3 CAN FD Bit Time Configuration
In order to achieve higher bandwidth, bits in a CAN FD frame are transmitted with two different
bit rates:
• Nominal Bit Rate (NBR): Used during arbitration until the sample point of the BRS bit and
the sample point of the CRC delimiter reach the EOF
• Data Bit Rate (DBR): Used during the data and CRC field
NBR is limited by the propagation delay of the CAN network (see Section 5.3.2 “Propagation
Delay”). In the data phase, only one transmitter remains; therefore, the bit rate can be increased.
The transmitting node always compares the intended transmitted bits with the actual bits on the
CAN bus. The propagation delay in the data phase can be longer than the bit time. In this case,
the data bits are sampled at a Secondary Sample Point (SSP) (see Section 5.3.3 “Transmitter
Delay Compensation (TDC)”).
NBR is the number of bits per second during the arbitration phase. It is the inverse of the Nominal
Bit Time (NBT) (see Equation 5-1).
Equation 5-1: Nominal Bit Rate/Time
DBR is the number of bits per second during the data phase. It is the inverse of the Data Bit Time
(DBT) (see Equation 5-2).
Equation 5-2: Data Bit Rate/Time
The Baud Rate Prescaler (BRP) is used to divide the SYSCLK. The divided SYSCLK is used to
generate the bit times.
There are two prescalers: NBRP for the Nominal Bit Rate Prescaler and DBRP for the Data Bit
Rate Prescaler. The Time Quanta (NTQ and DTQ) are selected as shown in Equation 5-3 and
Equation 5-4.
Equation 5-3: Nominal Time Quanta
Equation 5-4: Data Time Quanta
CAN bit times have four segments, as specified in ISO11898-1:2015 (see Figure 5-1).
Synchronization Segment (SYNC) – Synchronizes the different nodes connected on the CAN
bus. A bit edge is expected to be within this segment. The Synchronization Segment is always
1T
Q
.
Propagation Segment (PRSEG) – Compensates for the propagation delay on the bus. PRSEG
has to be longer than the maximum propagation delay.
Phase Segment 1 (PHSEG1) – Compensates for errors that may occur due to phase shifts in
the edges. The time segment may be automatically lengthened during resynchronization to
compensate for the phase shift.
NBR
1
NBT
-----------=
DBR
1
DBT
------------=
NTQ NBRP T
SYSCLK
NBRP
F
SYSCLK
--------------------------==
DTQ DBRP T
SYSCLK
DBRP
F
SYSCLK
--------------------------==
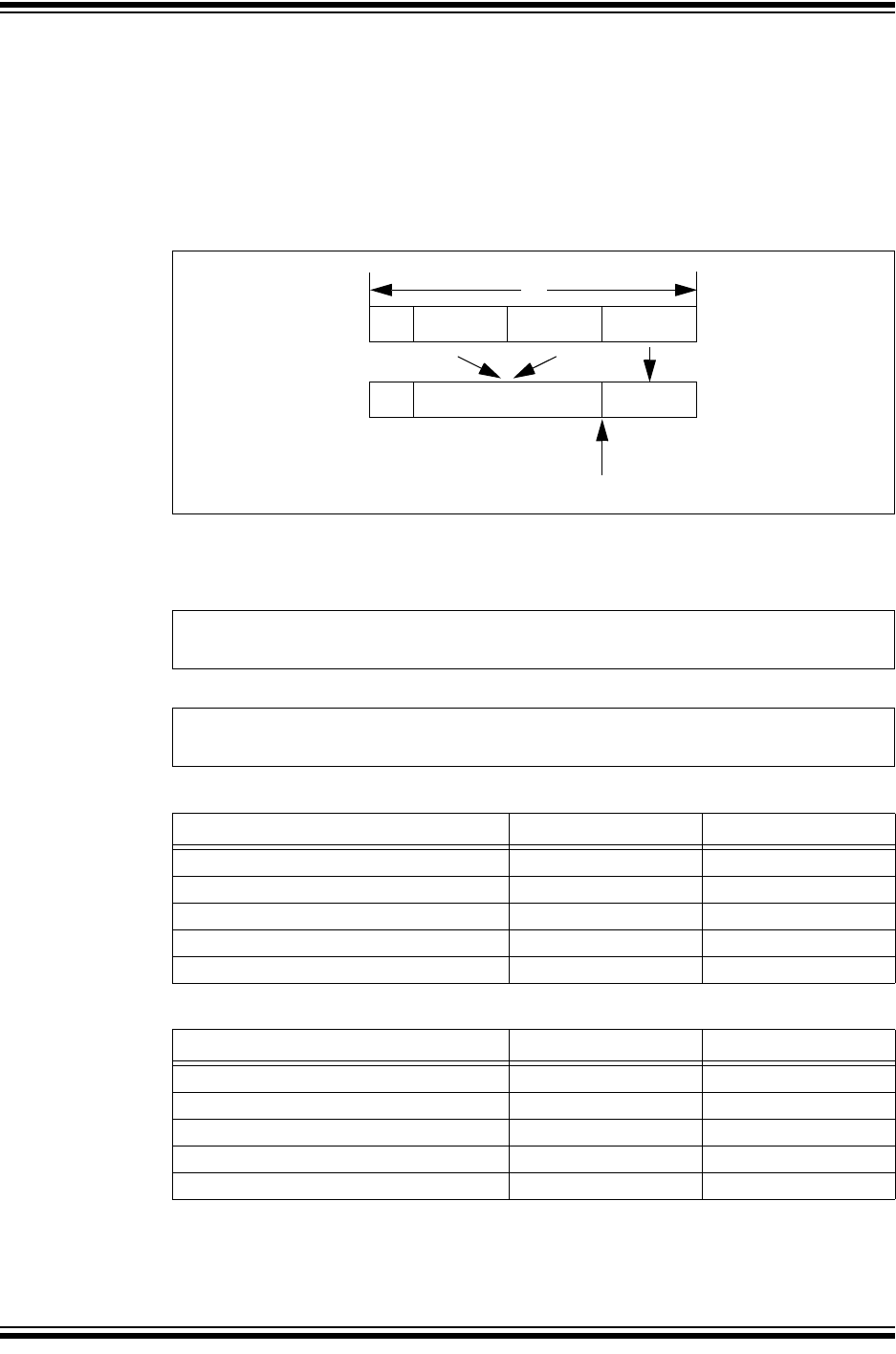
dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 60 2018 Microchip Technology Inc.
Phase Segment 2 (PHSEG2) – Compensates for errors that may occur due to phase shifts in
the edges. The time segment may be automatically shortened during resynchronization to
compensate for the phase shift.
In the Bit Time registers, PRSEG and PHSEG1 are combined to create TSEG1. PHSEG2 is
called TSEG2. Each segment has multiple Time Quanta (T
Q
). The sample point lies between
TSEG1 and TSEG2.
Table 5-1 and Tabl e 5-2 show the ranges for the bit time configuration parameters.
Figure 5-1: Partition of Bit Time
The total number of T
Q
in a bit time is programmable and can be calculated using Equation 5-5
and Equation 5-6.
Equation 5-5: Number of NTQ in a NBT
Equation 5-6: Number of DTQ in a DBT
Table 5-1: Nominal Bit Rate Configuration Ranges
Table 5-2: Data Bit Rate Configuration Ranges
Segment Min. Max.
NSYNC 1 1
NTSEG1 2 256
NTSEG2 1 128
NSJW 1 128
NTQ per Bit 4 385
Segment Min. Max.
DSYNC 1 1
DTSEG1 1 32
DTSEG2 1 16
DSJW 1 16
DTQ per Bit 3 49
TBIT
SYNC PRSEG PHSEG1 PHSEG2
SYNC TSEG1 TSEG2
Sample Point
NBT
NTQ
------------ NSYNC NTSEG1 NTSEG2++=
DBT
DTQ
------------ D S Y N C D T S E G 1 D T S E G 2++=

2018 Microchip Technology Inc. DS70005340A-page 61
CAN FD Protocol Module
5.3.1 SAMPLE POINT
The sample point is the point in the bit time at which the logic level of the bit is read and
interpreted. The sample point in percent can be calculated using Equation 5-7 and Equation 5-8.
Equation 5-7: Nominal Sample Point (%)
Equation 5-8: Data Sample Point (%)
5.3.2 PROPAGATION DELAY
Figure 5-2 illustrates the propagation delay between two CAN nodes on the bus, assuming
Node A is transmitting a CAN message. The transmitted bit will propagate from the transmitting
CAN Node A through the transmitting CAN transceiver, over the CAN bus, through the receiving
CAN transceiver, into the receiving CAN Node B.
During the arbitration phase of a CAN message, the transmitter samples the CAN bus and
checks if the transmitted bit matches the received bit. The transmitting node has to place the
sample point after the maximum propagation delay.
Equation 5-9 describes the maximum propagation delay; where t
TXD – RXD
is the propagation
delay of the transceiver, a maximum of 255 ns according to ISO11898-1:2015; T
BUS
is the delay
on the CAN bus, which is approximately 5 ns/m. The factor 2 comes from the worst case when
Node B starts transmitting exactly when the bit from Node A arrives.
Equation 5-9: Maximum Propagation Delay
Figure 5-2: Propagation Delay
NSP
1NTSEG1+
NBT
NTQ
------------
---------------------------------100=
DSP
1DTSEG1+
DBT
DTQ
------------
---------------------------------100=
T
PROP
2t
TXD RXD–
T
BUS
+=
T
PROP
T
PROPAB
T
PROPBA
+ 2 t
TXD RXD–
T
BUS
+==
Node A
TXCAN
RXCAN
CANH
CANL
Node B
RXCAN
TXCAN
CANH
CANL
Delay: Node A to B (T
PROPAB
)
CAN bus (T
BUS
)
Transceiver Propagation
Delay (t
TXD-RXD
)
Delay: Node B to A (T
PROPBA
)
Transceiver Propagation
Delay (t
TXD-RXD
)
CxTX
CxRX
Transceiver Propagation
Delay (t
TXD – RXD
)
Transceiver Propagation
Delay (t
TXD – RXD
)
CAN Bus (T
BUS
)
CxRX
CxTX
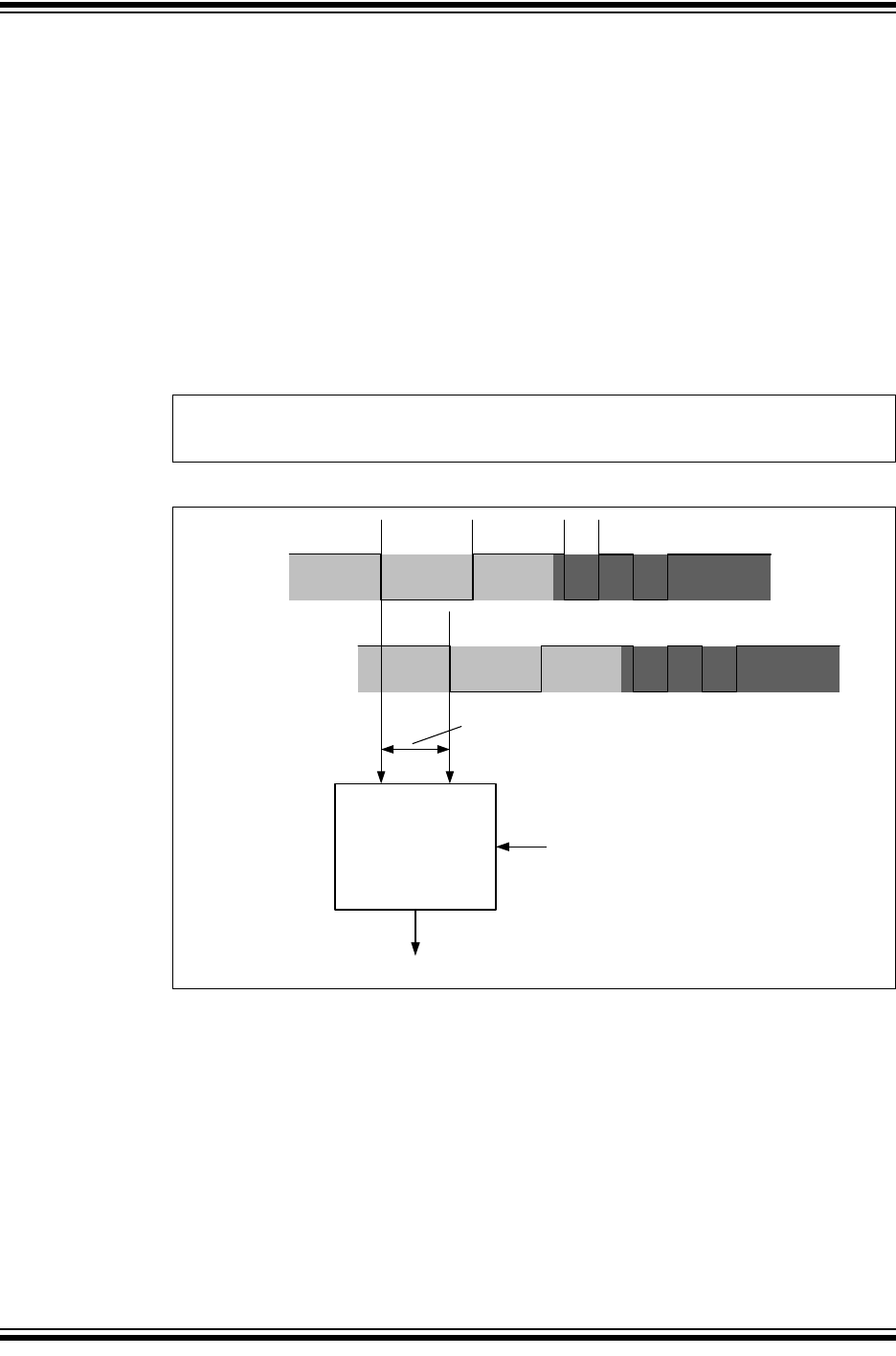
dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 62 2018 Microchip Technology Inc.
5.3.3 TRANSMITTER DELAY COMPENSATION (TDC)
During the data phase of a CAN FD transmission, only one node is transmitting; the others are
receiving. Therefore, the propagation delay does not limit the maximum data rate.
When transmitting via pin CxTX, the CAN FD Protocol Module receives the transmitted data
from its local CAN transceiver via pin CxRX. The received data is delayed by the CAN
transceiver’s loop delay. In case this delay is greater than 1 + DTSEG1, a bit error would be
detected.
In order to enable a data phase bit time that is shorter than the transceiver loop delay, the
Transmitter Delay Compensation (TDC) is implemented. Instead of sampling after DTSEG1, a
Secondary Sample Point (SSP) is calculated and used for sampling during the data phase of a
CAN FD message.
Figure 5-3 illustrates how the transceiver loop delay is measured and Equation 5-10 shows how
the SSP is calculated.
Equation 5-10: Secondary Sample Point
Figure 5-3: Measurement of Transceiver Delay (TDCV)
5.3.4 SYNCHRONIZATION
To compensate for phase shifts between the oscillator frequencies of the nodes on the CAN bus,
each CAN controller must be able to synchronize to the relevant edge of the incoming signal.
The CAN controller expects an edge in the received signal to occur within the SYNC segment.
Only recessive-to-dominant edges are used for synchronization.
There are two mechanisms used for synchronization:
• Hard Synchronization – Forces the edge that has occurred to lie within the
SYNC segment. The bit time counter is restarted with SYNC.
• Resynchronization – If the edge falls outside the SYNC segment, PHSEG1 or PHSEG2
will be adjusted.
For a more detailed description of the CAN synchronization, please refer to ISO11898-1:2015.
SSP = TDCV<5:0> + TDCO<6:0>
CxTX
FDF res BRS ESI DLC
Arbitration Phase
Data
Phase
CxRX
Arbitration Phase
Data
Phase
Transmitter Delay
Start Stop
Transmitter
Delay
Measurement
TSEG1<4:0> (C1DBTCFGH<4:0>)
Secondary Sample Point (SSP)
FDF

2018 Microchip Technology Inc. DS70005340A-page 63
CAN FD Protocol Module
5.3.5 SYNCHRONIZATION JUMP WIDTH
The Synchronization Jump Width (SJW) is the maximum amount that PHSEG1 and PHSEG2
can be adjusted during resynchronization. SJW is programmable (see Table 5 -1 and Table 5 - 2).
5.3.6 OSCILLATOR TOLERANCE
The oscillator tolerance, df, around the nominal frequency of the oscillator, f
nom
, is defined in
Equation 5-11.
Equation 5-12 through Equation 5-16 describe the conditions for the maximum tolerance of the
oscillator.
Equation 5-11: Oscillator Tolerance
Equation 5-12: Condition 1
Equation 5-13: Condition 2
Equation 5-14: Condition 3
Equation 5-15: Condition 4
Equation 5-16: Condition 5
1df–fnom F
SYSCLK
1df+fnom
df
NSJW
210
NBT
NTQ
------------
----------------------------------
df
min NPHSEG1 NPHSEG2,
213
NBT
NTQ
------------ NPHSEG2–
-------------------------------------------------------------------------
df
DSJW
210
DBT
DTQ
------------
----------------------------------
df
min NPHSEG1 NPHSEG2,
26
DBT
DTQ
------------ DPHSEG2–
DBRP
NBRP
----------------7
NBT
NTQ
------------+
--------------------------------------------------------------------------------------------------------------------------------
df
DSJW max 0
NBRP
DBRP
----------------1–
,
–
22
NBT
NTQ
------------ HNSEGP2
NBRP
DBRP
----------------DPHSEG24
DBT
DTQ
------------++
-------------------------------------------------------------------------------------------------------------------------------------------------------------------

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 64 2018 Microchip Technology Inc.
5.3.7 BIT TIME CONFIGURATION EXAMPLE
The following tables illustrate the configuration of the CAN FD Bit Time registers, assuming there
is a CAN FD network in an automobile with the following parameters:
• 500 kbps NBR – Sample Point at 80%
• 2 Mbps DBR – Sample Point at 80%
•40 Meters – Minimum Bus Length
Table 5-3 and Ta bl e 5 -4 illustrate how the bit time parameters are calculated. Since the
parameters depend on multiple constraints and equations, and are calculated using an iterative
process, it is recommended to enter the equations in a spreadsheet.
Table 5-5 translates the calculated values into register values. It is recommended to let the CAN
FD Protocol Module measure the Transmitter Delay Compensation Value (TDCV). This is
accomplished by setting TDCMOD<1:0> (C1TDCH<1:0>) = 10 (Automatic mode). In order to set
the SSP to 80%, TDCO<6:0> are set to 1 + DTSEG1.
Table 5-3: Step-by-Step Nominal Bit Rate Configuration
Table 5-4: Step-by-Step Data Bit Rate Configuration
Table 5-5: Bit Time Register Initialization (500k/2M)
Parameter Constraint Value Unit Equations and Comments
NBT NBT ≥ 1 s2s Equation 5-1.
F
OSC
F
OSC
≤ 80 MHz 80 MHz F
SYSCLK
= F
OSC
/2 = 40 MHz.
NBRP 1 to 256 1 — Select smallest possible BRP value to maximize resolution.
NTQ NBT, F
SYSCLK
12.5 ns Equation 5-3.
NBT/NTQ 4 to 385 160 — Equation 5-5.
NSYNC Fixed 1 NTQ Defined in ISO11898-1:2015.
NPRSEG NPRSEG > T
PROP
95 NTQ Equation 5-9: T
PROP
= 910 ns,
minimum NPRSEG = T
PROP
/NTQ = 72.8 NTQ.
Selecting 95 will allow up to 60m bus length.
NTSEG1 2 to 256 NTQ 127 NTQ Equation 5-7. Select NTSEG1 to achieve 80% NSP.
NTSEG2 1 to 128 NTQ 32 NTQ There are 32 NTQ left to reach NBT/NTQ = 160.
NSJW 1 to 128 NTQ;
SJW ≤ min (NPHSEG1, NPHSEG2)
32 NTQ Maximizing NSJW lessens the requirement for the oscillator tolerance.
Parameter Constraint Value Unit Equations and Comments
DBT DBT ≥ 125 ns 500 ns Equation 5-2.
DBRP 1 to 256 1 — Selecting the same prescaler as for NBT ensures that the T
Q
resolution does not change during the Bit Rate Switching.
DTQ DBT, F
SYSCLK
12.5 ns Equation 5-4.
DBT/DTQ 3 to 49 40 — Equation 5-6.
DSYNC Fixed 1 DTQ Defined in ISO11898-1:2015.
DTSEG1 1 to 32 DTQ 31 DTQ Equation 5-7. Select DTSEG1 to achieve 80% DSP.
DTSEG2 1 to 16 DTQ 8 DTQ There are 8 DTQ left to reach DBT/DTQ = 40.
DSJW 1 to 16 DTQ;
SJW ≤ min (DPHSEG1, DPHSEG2)
8 DTQ Maximizing DSJW lessens the requirement for the
oscillator tolerance.
Oscillator Tolerance
Conditions 1-5
Minimum of Conditions 1-5 0.78 % Equation 5-11 through Equation 5-16.
C1NBTCFGH/L Value C1DBTCFGH/L Value C1TDCH/L Value
BRP<7:0> 0 BRP<7:0> 0 TDCMOD<1:0> 2
TSEG1<7:0> 126 TSEG1<4:0> 30 TDCO<6:0> 31
TSEG2<6:0> 31 TSEG2<3:0> 7 TDCV<5:0> 0
SJW<6:0> 31 SJW<3:0> 7 — —

2018 Microchip Technology Inc. DS70005340A-page 65
CAN FD Protocol Module
5.4 Message Memory Configuration
The message objects of the TEF, TXQ and transmit/receive FIFOs are located in RAM (see
Figure 5-4). The application must configure the number of message objects in a FIFO between
Message Object 0 and Message Object 31. Additionally, the application must configure the
payload size of the message objects in each FIFO. This configuration determines where
message objects are located in RAM. The RAM allocation can only be configured in
Configuration mode.
In order to optimize RAM usage, the application should start configuring the RAM with the TEF,
followed by the TXQ, and continue with FIFO 1, FIFO 2, FIFO 3 and so on. In case a user
application requires TEF, TXQ and 16 additional FIFOs, it should configure TEF and TXQ,
followed by FIFO 1 through FIFO 16. It is not necessary to configure the unused FIFOs 17
through 31.
Figure 5-4: Message Memory Organization
5.4.1 TRANSMIT EVENT FIFO CONFIGURATION
In order to reserve space in RAM for the TEF, the STEF bit (C1CONH<3>) has to be set. The number
of message objects in the TEF is configured using the FSIZE<4:0> bits (C1TEFCONH<12:8>).
Transmitted messages can be timestamped by setting the TEFTSEN bit (C1TEFCONL<5>).
5.4.2 TRANSMIT QUEUE CONFIGURATION
In order to reserve space in RAM for the TXQ, the TXQEN bit (C1CONH<4>) has to be set. The
number of message objects in the TXQ is configured using the FSIZE<4:0> bits
(C1TXQCONH<12:8>. All objects in the TXQ use the same payload size (number of data bytes),
which is configured using PLSIZE<2:0> bits (C1TXQCONH<15:13>).
5.4.3 TRANSMIT FIFO CONFIGURATION
FIFO 1 through FIFO 31 can be configured as transmit FIFOs by setting TXEN in the C1FIFOCONxL
register. The number of message objects in each transmit FIFO is configured using the FSIZE<4:0>
bits (C1FIFOCONxH<12:8>). All objects in one transmit FIFO use the same payload size (number of
data bytes), which is determined by the PLSIZE<2:0> bits (C1FIFOCONxH<15:13>).
TEF
TXQ
FIFO 1
FIFO 2: Message Object 0
FIFO 2: Message Object 1
FIFO 2: Message Object n
FIFO 31
FIFO 3

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 66 2018 Microchip Technology Inc.
5.4.4 RECEIVE FIFO CONFIGURATION
FIFO 1 through FIFO 31 can be configured as receive FIFOs by clearing TXEN in the
C1FIFOCONxL register. The number of message objects in each receive FIFO is configured
using the FSIZE<4:0> bits (C1FIFOCONxH<12:8>). All objects in one receive FIFO use the
same payload size (number of data bytes), which is determined by the PLSIZE<2:0> bits
(C1FIFOCONxH<15:13>). Received messages can be timestamped by setting the RXTSEN bit
(C1FIFOCONxL<5>).
5.4.5 CALCULATION OF REQUIRED MESSAGE MEMORY
The size of required RAM depends on the configuration of each FIFO. Equation 5-17 through
Equation 5-19 specify the sizes of the TEF, TXQ and the FIFOs in bytes. The TEF or TXQ is not
used if their size is zero.
Since the size of the integrated RAM is limited, the user must check that the memory configuration
fits into RAM. Equation 5-20 can be used to calculate the total RAM usage in bytes.
The size of the TEF objects depends on the enabling of timestamping. If TEFTSEN is set, then
tefts = 4, else tefts = 0.
The PayLoad(i) is defined in data bytes.
The size of a message object of an RX FIFO varies dependent on the enabling of timestamping.
If RXTSEN = 1 and TXEN = 0 for FIFO(i), then rxts(i) =4, else rxts(i) =0.
N is defined as the number of FIFOs used in addition to the TEF and the TXQ.
Equation 5-17: Size of TEF
Equation 5-18: Size of TXQ
Equation 5-19: Size of FIFOs
Equation 5-20: Total RAM Usage
For example:
• If TEF is 4 messages deep (N
Elements
(TEF) = 4) and TEFTSEN is clear,
then the size of TEF = S
TEF
= 4 x (0 + 8) = 32 bytes
•If N
Elements
(TXQ) = 1, PayLoad (TXQ) = 12,
then the size of TXQ = S
TXQ
= 1 x (8 + 12) = 20 bytes
•If N
Elements
(FIFO) = 3, PayLoad (FIFO) = 8,
then the size of FIFO = S
FIFO
= 3 x (8 + 8) = 48 bytes
Therefore, SRAM = S
TEF
+ S
TXQ
+ S
FIFO
= 32 + 20 + 48 = 100 bytes.
S
TEF
N
Elements
TEFtefts 8+=
S
TXQ
N
Elements
TXQ8 PayLoad TXQ+=
S
FIFO
i N
Elements
i rxts i 8 PayLoad i++=
S
RAM
S
TEF
S
TXQ
S
FIFO
i
i1=
N
++
=

2018 Microchip Technology Inc. DS70005340A-page 67
CAN FD Protocol Module
6.0 MESSAGE TRANSMISSION
The application has to configure the FIFO or TXQ before it can be used for transmission
(see Section 5.4.3 “Transmit FIFO Configuration” and Section 5.4.2 “Transmit Queue
Configuration”).
6.1 Transmit Message Object
Table 6-1 specifies the transmit message object used by the TXQ and the transmit FIFOs. The
transmit objects contain the message ID, control bits and payload.
• SID: Standard Identifer or Base Identifier.
• EID: Extended Identifier.
• DLC: Data Length Code; specifies the number of data bytes to transmit (see Section 2.1.1
“DLC Encoding”).
• IDE: Identifier Extension; clearing this bit will transmit a base frame, setting this bit will
transmit an extended frame.
• RTR: Remote Transmit Request; this bit is only specified in CAN 2.0 frames. Setting this bit
will request a transmission of a receiving node.
• FDF: FD Format; if this bit is set, a CAN FD frame will be transmitted; otherwise, a CAN 2.0
frame will be transmitted. If Normal CAN 2.0 mode is selected, this bit is ignored and only
CAN 2.0 frames are transmitted.
• BRS: Bit Rate Switch; the data phase of a CAN FD frame will be transmitted using DBR if
this bit is set. If the bit is clear, the whole frame will be transmitted using NBR.
• ESI: Error State Indicator; normally, the ESI bit reflects the error status of the transmitting
node. A recessive ESI bit in a CAN FD frame indicates that the transmitting node is
error passive, a dominant bit shows that the transmitting node is error active. If
ESIGM (C1CONH<1>) = 0, this bit in the object is ignored. If ESIGM = 1, the ESI bit in the
transmitted message will be transmitted recessive if the CAN FD Protocol Module is error
passive, or if the ESI bit in the message object is set. A gateway application would use it to
signal that the ESI bit of the transmitting node is set.
• SEQ: Sequence Number; SEQ is not transmitted on the CAN bus. It is used to keep track
of the transmitted messages. SEQ is stored in the TEF message object.
• Transmit Buffer Data: contains the payload of the message. Only the number of data
bytes specified by the DLC are transmitted. Byte 0 is transmitted first, followed by 1, 2 and
so on.
6.2 Loading Messages into Transmit FIFO
Before loading a message into the FIFO, the application must ensure that the FIFO is not full.
There is space in the FIFO if TFNRFNIF (C1FIFOSTAx<0>). is set. Loading a message into a full
FIFO can corrupt a message that is being transmitted.
The FIFO user address (C1FIFOUAxH/L) points to the RAM of the next transmit message object
where the application should store the message. T0 of the transmit message object is loaded first,
followed by T1, T2 and so on. The maximum number of data bytes is limited by the configured
payload. Only the number of data bytes specified by the DLC have to be loaded.
After the message object is loaded into RAM, the FIFO needs to be incremented by setting the
UINC bit (C1FIFOCONxL<8>). Doing so will cause the CAN FD Protocol Module to increment
the head of the FIFO and update C1FIFOUAxH/L.
Now the message is ready for transmission and the next message can be loaded at the new
address.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 68 2018 Microchip Technology Inc.
6.3 Loading Messages Into Transmit Queue
Loading transmit message objects into the TXQ works similarly to loading message objects into
a transmit FIFO. The application must check the C1TXQSTA register to see if there is space in
the TXQ. The C1TXQUAH/L registers should be used instead of the C1FIFOUAxH/L registers to
calculate the address to load the message and set the UINC bit (C1TXQCONL<8>) to increment
the head of the TXQ.
Table 6-1: Transmit Message Object (TXQ and TX FIFO)
Words Bits Bit 15/7 Bit 14/6 Bit 13/5 Bit 12/4 Bit 11/3 Bit 10/2 Bit 9/1 Bit 8/0
T0
15:8 EID<4:0> SID<10:8>
7:0 SID<7:0>
T1
15:8
— — SID11 EID<17:13>
7:0 EID<12:5>
T2
15:8 SEQ<6:0> ESI
7:0 FDF BRS RTR IDE DLC<3:0>
T3
15:8 — — — — — — — —
7:0
— — — — — — — —
T4
(1)
15:8 Transmit Data Byte 1
7:0 Transmit Data Byte 0
T5
(1)
15:8 Transmit Data Byte 3
7:0 Transmit Data Byte 2
T6
15:8 Transmit Data Byte 5
7:0 Transmit Data Byte 4
T7
15:8 Transmit Data Byte 7
7:0 Transmit Data Byte 6
Ti-1
15:8 Transmit Data Byte n-3
7:0 Transmit Data Byte n-2
Ti
15:8 Transmit Data Byte n
7:0 Transmit Data Byte n-1
bit 15:11 (T0) EID<4:0>: Extended Identifier bits
bit 10-0 (T0) SID<10:0>: Standard Identifier bits
bit 15-14 (T1) Unimplemented: Read as ‘x’
bit 13 (T1) SID11: In FD mode, the Standard ID can be extended to 12 bits using r1
bit 12-0 (T1) EID<17:5>: Extended Identifier bits
bit 15-9 (T2) SEQ<6:0>: Sequence to keep track of transmitted messages in transmit event FIFO bits
bit 8 (T2) ESI: Error Status Indicator bit
In CAN to CAN Gateway mode (ESIGM (C1CONH<1>) = 1), the transmitted ESI flag is a “logical OR”
of ESI (T1) and the error passive state of the CAN controller.
In Normal mode, ESI indicates the error status:
1 = Transmitting node is error passive
0 = Transmitting node is error active
bit 7 (T2) FDF: FD Frame bit; distinguishes between CAN and CAN FD formats
bit 6 (T2) BRS: Bit Rate Switch bit; selects if Data Bit Rate is switched
bit 5 (T2) RTR: Remote Transmission Request bit; not used in CAN FD
bit 4 (T2) IDE: Identifier Extension bit; distinguishes between base and extended format
bit 3-0 (T2) DLC<3:0>: Data Length Code bits
bit 15:0 (T3) Unimplemented: Read as ‘x’
Note 1: Data Bytes 0-n: Payload size is configured individually in the PLSIZE<2:0> bits (C1FIFOCONxH<15:13>).

2018 Microchip Technology Inc. DS70005340A-page 69
CAN FD Protocol Module
6.4 Requesting Transmission of Message in Transmit FIFO
After a message is loaded into a transmit FIFO, the message is ready for transmission. The
application initiates the transmission of all messages in a FIFO by setting the TXREQ bit
(C1FIFOCONL<9>) or by setting the corresponding bit in the C1TXREQH/L registers. When all
messages are transmitted, TXREQ gets cleared. The application can request transmission of
multiple FIFOs and the TXQ simultaneously. The FIFO or TXQ with the highest priority will start
transmitting first. Messages in a FIFO will be transmitted First-In-First-Out.
Messages can be loaded into a FIFO while the FIFO is transmitting messages. Since TXREQ is
cleared by the FIFO automatically after the FIFO empties, UINC and TXREQ of the
C1FIFOCONL register must be set at the same time after appending a message. This ensures
that all messages in the FIFO are transmitted, including the appended messages.
6.5 Requesting Transmission of Message in Transmit Queue
After a message is loaded into the TXQ, the message is ready for transmission. The application
initiates the transmission of all messages in the queue by setting TXREQ (C1TXQCONL<9>).
When all messages have been transmitted, TXREQ will be cleared. The application can request
transmission of the TXQ and multiple FIFOs simultaneously. The TXQ or FIFO of the
C1TXQCONL register with the highest priority will start transmitting first. Messages in the TXQ
will be transmitted based on their ID. The message with the highest priority ID and the lowest ID
value will be transmitted first.
Messages can be loaded into the TXQ while the TXQ is transmitting messages. Since TXREQ
is cleared by the TXQ automatically after the TXQ empties, UINC and TXREQ of the
C1TXQCONL register must be set at the same time after appending a message. This ensures
that all messages in the TXQ are transmitted, including the appended messages.
6.6 C1TXREQ Register
The C1TXREQH and C1TXREQL registers contain the TXREQ<31:0> bits of the TXQ and of all
the TX FIFOs. They have the following purposes:
• The user application can request transmission of the TXQ and/or one or more TX FIFOs,
using only one SPI instruction, by setting the corresponding bits in the C1TXREQH/L
registers. Clearing a bit does NOT abort any transmissions.
• Reading the C1TXREQH and C1TXREQL registers gives information about which transmit
FIFOs have transmissions pending.
C1TXREQL<0> is mapped to the TXQ, C1TXREQL<1> is mapped to TX FIFO 1,
C1TXREQL<2> is mapped to TX FIFO 2 and so on. C1TXREQH<31> is mapped to TX FIFO 31.
6.7 Transmit Priority
The transmit priority of the FIFOs and TXQ needs to be configured using the TXPRIx bits
(C1FIFOCONxH<4:0> and C1TXQCONH<4:0>).
Before transmitting a message, the priorities of the TXQ and the TX FIFOs queued for
transmission are compared. The FIFO/TXQ with the highest priority will be transmitted first. For
example, if transmit FIFO 1 has a higher priority setting than FIFO 3, all messages in FIFO 1 will
be transmitted first. If multiple FIFOs have the same priority, the FIFO with the highest index is
transmitted. For example, if FIFO 1 and FIFO 3 have the same priority setting, all messages in
FIFO 3 will be transmitted first. If the TXQ and one or more FIFOs have the same priority, all
messages in the TXQ will be transmitted first.
The transmit priority will be recalculated after every successful transmission of a single
message.
6.7.1 TRANSMIT PRIORITY OF MESSAGES IN FIFO
In this method, the messages in a FIFO are transmitted First-In-First-Out.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 70 2018 Microchip Technology Inc.
6.7.2 TRANSMIT PRIORITY OF MESSAGES IN TXQ
Messages in the TXQ are transmitted based on the message ID. The message with the lowest
message ID (highest priority) is transmitted first.
6.7.3 TRANSMIT PRIORITY BASED ON ID
The goal of transmitting CAN messages based on ID is to avoid “Inner Priority Inversion”. If a
low-priority message is waiting to get transmitted due to bus traffic (arbitration), a higher priority
message could be prevented from being transmitted. The TXQ solves this issue by reprioritizing
the messages in the queue based on priority (ID).
6.8 Transmit Bandwidth Sharing
The bandwidth sharing feature works as follows:
• After a successful transmission of a message, the module will remain Idle for n arbitration
bit times before the module attempts to transmit the next message; it suspends the next
transmission.
• After the device has received a message, the module can transmit the next message as
soon as the bus is Idle.
This allows other nodes on the bus to transmit their messages, even though they are of lower
priority.
The number of arbitration bit times between transmissions can be configured using the
TXBWS<3:0> bits (C1CONH<15:12>).
6.9 Retransmission Attempts
The number of retransmission attempts can be configured as follows:
• Retransmission attempts are disabled
• Three retransmission attempts
• Unlimited retransmissions
The retransmission attempts can be restricted by setting RTXAT (C1CONH<0>). The number of
retransmission attempts can be configured individually for each transmit FIFO and the TXQ
using TXAT<1:0> (C1FIFOCONxH<6:5> and C1TXQCONH<6:5>, respectively).
In case RTXAT = 0, unlimited retransmission attempts will be used for all transmit FIFOs and
the TXQ, and TXATx will be ignored.
6.9.1 RETRANSMISSION ATTEMPTS DISABLED
TXREQ will be cleared after the attempt to transmit the message. If the message is not
successfully transmitted due to loss of arbitration or due to an error, TXATIF in the C1FIFOSTAx
or C1TXQSTA register will be set.
6.9.2 THREE RETRANSMISSION ATTEMPTS
In case an error is detected during transmission, the CAN FD Protocol Module will decrement
the number of remaining attempts and try to retransmit the message the next time the bus is
Idle. In case arbitration is lost, the number of remaining attempts will not change. If all
retransmission attempts are exhausted, TXREQ will be cleared and TXATIF in C1FIFOSTAx or
C1TXQSTA will be set.
Before retransmitting the message, the transmit priority will be recalculated. The retransmission
attempts will be reinitialized if a different TX FIFO or TXQ is selected for transmission, or if a
message is received after the last transmission attempt.
6.9.3 UNLIMITED RETRANSMISSIONS
TXREQ will be cleared only after all messages in the TX FIFO or TXQ are successfully transmitted.

2018 Microchip Technology Inc. DS70005340A-page 71
CAN FD Protocol Module
6.10 Aborting Transmission
A pending transmission can only be aborted before the transmission of the message starts,
before the Start-of-Frame (SOF).
The transmission of a specific FIFO can be aborted by clearing TXREQ in the Transmit Queue
Control register; it cannot be aborted by clearing the bits in the C1TXREQH/L registers. Writing
a ‘0’ to one of the bits in the C1TXREQH/L registers will be ignored. The TXABT bit in the FIFO
Status register will be set after a successful abortion. TXREQ will remain set until the message
either aborts or is successfully transmitted.
Setting ABAT (C1CONH<11>) will abort all pending messages of all FIFOs. After all TXREQx bits
are cleared, ABAT has to be cleared in order to be able to transmit new messages.
Clearing TXREQ for a transmit FIFO will attempt to abort all transmissions in the FIFO. If a
message is successfully transmitted, the FIFO index will be updated as normal. If the message
is successfully aborted, the FIFO index will not change.
The user can then use the FIFO Message Index bits, FIFOCI<4:0> (C1FIFOSTAx<12:8>), to
identify messages that are transmitted. To reset the transmit FIFO index and erase all pending
messages the user can set FRESET. The FIFO can then be loaded with new messages to be
transmitted.
6.11 Remote Transmit Request – RTR
The CAN bus system has a method for allowing a master node to request data from another
node. The master sends a message with the RTR bit set. The message contains no data, only
an address to trigger a filter match.
Remote frames are only specified for CAN 2.0 frames; they are not supported in CAN FD frames.
The filter that is configured to respond to a Remote Transmit Request will point to a FIFO that is
configured for transmission and RTREN has to be set.
Automatic remote data requests can be handled without MCU intervention. If a FIFO is properly
configured, when a filter matches and points to the FIFO, the FIFO will be queued for
transmission.
The FIFO must be configured as follows:
• Set TXEN to ‘1’.
• A filter must be enabled and loaded with a matching message identifier
• The Buffer Pointer for that filter must point to the TX FIFO. (Normally, a filter points to an
RX FIFO.)
• RTREN bit must be set to ‘1’ to enable RTR.
• The FIFO must be preloaded with at least one message to be sent.
When an RTR message is received, and it matches a filter pointing to a properly configured
transmit FIFO, the TXREQ bit is set, queuing the object for transmission according to priorities.
A FIFO will only be transmitted if TXEN and RTREN are set, and if it is NOT empty. When a
request for a remote transmission occurs while the FIFO is empty, the event will be treated as an
overflow and the RXOVIF bit will be set.
6.12 Mismatch of DLC and Payload Size During Transmission
The PLSIZEx bits reserve a certain number of bytes in the transmit FIFO. The CAN FD Protocol
Module handles mismatches between the DLC and payload size as follows:
• If the DLC is smaller than the reserved payload, the number of data bytes specified by the
DLC will be transmitted.
• If the DLC is bigger than the reserved payload, the module will not transmit the message.
Instead, it will set the IVMIF (C1INTL<15>) and DLCMM (C1BDIAG1H<15>) flags and
clear the TXREQ flag. The application can use the TEF to identify the message that is not
transmitted.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 72 2018 Microchip Technology Inc.
6.13 Transmit State Diagram
Figure 6-1 describes how messages are queued for transmission. It illustrates how the most
important transmit flags are set and cleared:
1. Messages are queued for transmission by setting the TXREQ flag.
2. The transmit priority will be determined. The FIFO or TXQ with the highest priority TXPRIx
flag will be selected. The index of the TX message in the FIFO or TXQ will be calculated.
3. The TX message is pending for transmission.
4. Transmission can only start when the bus is Idle.
5. A pending transmission can only be aborted before SOF is transmitted.
6. During the transmission of a message, the CAN FD Protocol Module checks for the
following:
a) Loss of arbitration during the arbitration field.
b) Transmit errors.
7. In case a message of a TX FIFO or the TXQ is transmitted successfully, the TXREQ will
only be cleared after all messages of the FIFO are transmitted. After the transmission of
any message, the status flags of the FIFO or TXQ are updated. In case STEF
(C1CONH<3>) is set, the message will be stored into the TEF and a timestamp will be
attached if enabled.
8. In case arbitration is lost, TXLARB of the TX FIFO or TXQ will be set and the device will
switch over to receiving the message (see Section 9.0 “Message Reception”).
9. In case an error is detected during the transmission of a message, an error frame will be
transmitted and the appropriate error flags will be set. Messages will be retransmitted
according to Section 6.9 “Retransmission Attempts”.
Figure 6-1: Transmit State Diagram
Yes
No
No
RX Done
Abort: Set ABAT
Yes
No
Success
Yes
Error
Lost Arbitration
Abort: Clr TXREQ[Index]
Any TXREQ
Bus Idle & Waited for Suspend Time
IDLE
Calculate
TX Priority
Result: Index
TX
Pending[Index]
Wait for
Suspend Time
TX In Progress
SOF
Transmit[Index]
TX ERR
Set TXERRIF Flag
TX Attempts--
TX Successful
Set TXIF[Index]
Clr TXREQ[Index]
c
STEF = 1?
Safe Msg to TEF
TX ABORT
Set
TXABT[Index]
ABORT ALL
Clr All TXREQ
Set All TXABT
Lost Arbitration
Set
TXLARB[Index]
Clr TXREQ[Index]
Set
TXATIF[Index]
RX Message
c
TX Attempts Exhausted?
Re-Init TX
Attempts
Based on New
Index
c
New TX Index or
Received a Message?

2018 Microchip Technology Inc. DS70005340A-page 73
CAN FD Protocol Module
6.14 Resetting Transmit FIFO
A Transmit FIFO can be reset by:
• Setting FRESET (C1FIFOCONxL<10>) or
• Placing the module in Configuration mode (OPMOD<2:0> = 100)
Resetting the FIFO will reset the Head and Tail Pointers, and the C1FIFOSTAx register. The
settings in the C1FIFOCONxL and C1FIFOCONxH registers will not change.
Before resetting a TX FIFO using FRESET, ensure no transmissions are pending.
6.15 Resetting Transmit Queue
The Transmit Queue can be reset by:
• Setting FRESET (C1TXQCONL<10>) or
• Placing the module in Configuration mode (OPMOD<2:0> = 100)
Resetting the TXQ will reset the Head and Tail Pointers, and the C1TXQSTA register. The
settings in the C1TXQCONL and C1TXQCONH registers will not change.
Before resetting the TXQ using FRESET, ensure no transmissions are pending.
6.16 Message Transmission Code Example
Example 6-1: Message Transmission Code
#include <xc.h>
/* This code example demonstrates a method to configure the CAN FD module to transmit Standard and
Extended ID CAN FD messages. This uses CAN1, TXQ and FIFO1. TXQ size is 1 and FIFO1 size is 2. */
/* Include fuse configuration code here. */
#define MAX_WORDS 100
unsigned int __attribute__((aligned(4)))CanTxBuffer[MAX_WORDS];
/*Data structure to implement a CANFD message buffer. */
/* CANFD Message Time Stamp */
typedef unsigned long CANFD_MSG_TIMESTAMP;
/* CAN TX Message Object Control*/
typedef struct _CANFD_TX_MSGOBJ_CTRL {
unsigned DLC:4;
unsigned IDE:1;
unsigned RTR:1;
unsigned BRS:1;
unsigned FDF:1;
unsigned ESI:1;
unsigned SEQ:7;
unsigned unimplemented1:16;
} CANFD_TX_MSGOBJ_CTRL;
/* CANFD TX Message ID*/
typedef struct _CANFD_MSGOBJ_ID {
unsigned SID:11;
unsigned long EID:18;
unsigned SID11:1;
unsigned unimplemented1:2;
} CANFD_MSGOBJ_ID;

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 74 2018 Microchip Technology Inc.
Example 6-1: Message Transmission Code Example (Continued)
/* CAN TX Message Object*/
typedef union _CANFD_TX_MSGOBJ {
struct {
CANFD_MSGOBJ_ID id;
CANFD_TX_MSGOBJ_CTRL ctrl;
CANFD_MSG_TIMESTAMP timeStamp;
} bF;
unsigned int word[4];
unsigned char byte[8];
} CANFD_TX_MSGOBJ;
int main(void)
{
unsigned char index;
/* Place code to set device speed here. For this example the device speed should be set at 40 MHz
(i.e., the device is operating at 40 MIPS). */
ConfigureDeviceClockFor40MIPS(); // FCY = 40MIPS
/* The dsPIC33CH device features I/O remap. This I/O remap configuration for the CAN FD module can
be performed here. */
SetIORemapForECANModule();
/* Set up the CAN clock generator for 40 MIPS and enable the CAN clock generator. */
ConfigureCanfdClockFor40MIPS();
/* Enable the CANFD module */
C1CONLbits.ON = 1;
/* Place CAN module in configuration mode */
C1CONHbits.REQOP = 4;
while(C1CONHbits.OPMOD != 4);
/* Initialize the C1FIFOBA with the start address of the CAN FIFO message buffer area. */
C1FIFOBAL = (unsigned int) &CanTxBuffer;
/* Set up the CANFD module for 1Mbps of Nominal bit rate speed and 2Mbps of Data bit rate. */
C1NBTCFGH = 0x003E;
C1NBTCFGL = 0x0F0F;
C1DBTCFGH = 0x001E;
C1DBTCFGL = 0x0707;
C1TDCH = 0x0002; //TDCMOD is Auto
C1TDCL = 0x1F00;
/* Configure CANFD module to enable Transmit Queue and BRS*/
C1CONLbits.BRSDIS = 0x0;
C1CONHbits.STEF = 0x0; //Don't save transmitted messages in TEF
C1CONHbits.TXQEN = 0x1;
/* Configure TXQ to transmit 1 message*/
C1TXQCONHbits.FSIZE = 0x0; // single message
C1TXQCONHbits.PLSIZE = 0x7; // 64 bytes of data
/* Configure FIFO1 to transmit 2 messages*/
C1FIFOCON1Hbits.FSIZE = 0x1; //2 messages
C1FIFOCON1Hbits.PLSIZE = 0x2; //16 bytes of data
C1FIFOCON1Lbits.TXEN = 0x1; // Set TXEN bit ,transmit fifo
/* Place the CAN module in Normal mode. */
C1CONHbits.REQOP = 0;
while(C1CONHbits.OPMOD != 0);

2018 Microchip Technology Inc. DS70005340A-page 75
CAN FD Protocol Module
Example 6-1: Message Transmission Code Example (Continued)
/* Get the address of the message buffer to write to. Load the buffer and then set the UINC bit.
Set the TXREQ bit next to send the message. */
CANFD_TX_MSGOBJ *txObj;
/* Transmit message from TXQ - CANFD base frame with BRS*/
/* SID = 0x100, 64 bytes of data */
txObj = (CANFD_TX_MSGOBJ *)C1TXQUAL;
txObj->bF.id.SID = 0x100;
txObj->bF.id.EID = 0x0000;
txObj->bF.ctrl.BRS = 1 ; //Switch bit rate
txObj->bF.ctrl.DLC = 0xF; //64 bytes
txObj->bF.ctrl.FDF = 1; // CANFD frame
txObj->bF.ctrl.IDE = 0; //Standard frame
for (index=0;index<0x40;index++ )
{
txObj->byte[index+8] = 0x5A ; // 64 bytes of 0x5A
}
C1TXQCONLbits.UINC = 1; // Set UINC bit
C1TXQCONLbits.TXREQ = 1; // Set TXREQ bit
/* Transmit message 0 from FIFO 1 - CANFD base frame with BRS*/
/* SID = 0x300 , 16 bytes of data */
txObj = (CANFD_TX_MSGOBJ *)C1FIFOUA1L;
txObj->bF.id.SID = 0x300;
txObj->bF.id.EID = 0x0000;
txObj->bF.ctrl.BRS = 1 ; //Switch bit rate
txObj->bF.ctrl.DLC = 0xA; //16 bytes
txObj->bF.ctrl.FDF = 1; // CANFD frame
txObj->bF.ctrl.IDE = 0; //Standard frame
for (index=0;index<0x10;index++ )
{
txObj->byte[index+8] = 0xA5 ; // 16 bytes of 0xA5
}
C1FIFOCON1Lbits.UINC = 1; // Set UINC bit
C1FIFOCON1Lbits.TXREQ = 1; // Set TXREQ bit
/* Transmit message 1 from FIFO 1 - CANFD base frame with BRS*/
/* SID = 0x500, EID = 0xC000, 12 bytes of data */
txObj = (CANFD_TX_MSGOBJ *)C1FIFOUA1L;
txObj->bF.id.SID = 0x500;
txObj->bF.id.EID = 0xC000;
txObj->bF.ctrl.BRS = 1 ; //Switch bit rate
txObj->bF.ctrl.DLC = 0x9; //12 bytes
txObj->bF.ctrl.FDF = 1; // CANFD frame
txObj->bF.ctrl.IDE = 0; //Standard frame
for (index=0;index<0xC;index++ )
{
txObj->byte[index+8] = 0x55 ; // 12 bytes of 0x55
}
C1FIFOCON1Lbits.UINC = 1; // Set UINC bit
C1FIFOCON1Lbits.TXREQ = 1; // Set TXREQ bit
while(1);
}

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 76 2018 Microchip Technology Inc.
7.0 TRANSMIT EVENT FIFO – TEF
The TEF allows the application to keep track of the order and time in which the messages are
transmitted. The TEF works similarly to a receive FIFO. Instead of storing received messages, it
stores transmitted messages. Messages are only saved if STEF (C1CONH<3>) is set. The
sequence number (SEQ) of the transmitted message is copied into the TEF object. The payload
data is not stored. Transmitted messages are timestamped if TEFTSEN is set.
Table 7-1 specifies the TEF object. The first two words of the TEF object are a copy of the
transmit message object. Optionally, the TEF object contains the timestamp when the message
is transmitted.
7.1 Reading a TEF Object
Before reading a TEF object, the application must check that the TEF is not empty by reading
the C1TEFSTA register. The TEF is not empty if TEFNEIF is set.
The TEF user address points to the address in RAM of the next TEF object to read. The actual
address in RAM is calculated using Equation 7-1. TE0 of the TEF object is read first, followed by
TE1 and TE2.
Equation 7-1: Start Address of TEF Object
After the TEF object is read from RAM, the TEF needs to be incremented by setting UINC
(C1TEFCONL<8>). This will cause the CAN FD Protocol Module to increment the Tail and
update C1TEFUAH/L.
Now the next message can be read from the TEF.
7.1.1 RESETTING THE TEF
TEF can be reset by:
• Setting FRESET (C1TEFCONL<10>) or
• Placing the module in Configuration mode (OPMOD<2:0> = 100)
Resetting the FIFO will reset the Head and Tail Pointers, and the C1TEFSTA register. The
settings in the C1TEFCONH and C1TEFCONL registers will not change.
A = BaseAddress = C1FIFOBAH/L

2018 Microchip Technology Inc. DS70005340A-page 77
CAN FD Protocol Module
Table 7-1: Transmit Event FIFO Object
Words Bits Bit 15/7 Bit 14/6 Bit 13/5 Bit 12/4 Bit 11/3 Bit 10/2 Bit 9/1 Bit 8/0
TE0
15:8 EID<4:0> SID<10:8>
7:0 SID<7:0>
TE1
15:8
— — SID11 EID<17:13>
7:0 EID<12:5>
TE2
15:8 SEQ<6:0> ESI
7:0 FDF BRS RTR IDE DLC<3:0>
TE3
15:8
— — — — — — — —
7:0 — — — — — — — —
TE4
(1)
15:8 TXMSGTS<15:8>
7:0 TXMSGTS<7:0>
TE5
(1)
15:8 TXMSGTS<31:24>
7:0 TXMSGTS<23:16>
bit 15:11 (TE0) EID<4:0>: Extended Identifier bits
bit 10-0 (TE0) SID<10:0>: Standard Identifier bits
bit 15-14 (TE1) Unimplemented: Read as ‘x’
bit 13 (TE1) SID11: In FD mode, the Standard ID can be extended to 12 bits using r1
bit 12-0 (TE1) EID<17:5>: Extended Identifier bits
bit 15-9 (TE2) SEQ<6:0>: Sequence to keep track of transmitted messages in transmit event FIFO bits
bit 8 (TE2) ESI: Error Status Indicator bit
In CAN to CAN Gateway mode (ESIGM (C1CONH<1>) = 1), the transmitted ESI flag is a “logical OR”
of ESI (TE2) and the error passive state of the CAN controller.
In Normal mode, ESI indicates the error status:
1 = Transmitting node is error passive
0 = Transmitting node is error active
bit 7 (TE2) FDF: FD Frame bit; distinguishes between CAN and CAN FD formats
bit 6 (TE2) BRS: Bit Rate Switch bit; selects if Data Bit Rate is switched
bit 5 (TE2) RTR: Remote Transmission Request bit; not used in CAN FD
bit 4 (TE2) IDE: Identifier Extension bit; distinguishes between base and extended format
bit 3-0 (TE2) DLC<3:0>: Data Length Code bits
bit 15-0 (TE3) Unimplemented: Read as ‘x’
bit 15-0 (TE4) TXMSGTS<15:0>: Transmit Message Timestamp bits
bit 15-0 (TE5) TXMSGTS<31:16>: Transmit Message Timestamp bits
Note 1: TE4 and TE5 (TXMSGTSx) only exit in objects where TEFTSEN (C1TEFCONL<5>) is set.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 78 2018 Microchip Technology Inc.
7.2 Transmit Event FIFO Code Example
A code example to save the transmitted messages using TEF is shown in Example 7-1.
Example 7-1: Using the Transmit Event FIFO Code
#include <xc.h>
/* This code example demonstrates a method to configure the CAN FD module to save the transmitted
messages in the TEF. This example uses CAN1, FIFO1 and TEF */
/* Include fuse configuration code here. */
#define MAX_WORDS 100
unsigned
int __attribute__((aligned(4)))CanTxBuffer[MAX_WORDS];
//message buffer to be written
unsigned int * currentMessageBuffer; //
Points to message buffer to be read
/*data structure to implement a CANFD message buffer. */
/* CANFD Message Time Stamp */
typedef unsigned long CANFD_MSG_TIMESTAMP;
/* CAN TX Message Object Control*/
typedef struct _CANFD_TX_MSGOBJ_CTRL {
unsigned DLC:4;
unsigned IDE:1;
unsigned RTR:1;
unsigned BRS:1;
unsigned FDF:1;
unsigned ESI:1;
unsigned SEQ:7;
unsigned unimplemented1:16;
} CANFD_TX_MSGOBJ_CTRL;
/* CANFD TX Message ID*/
typedef struct _CANFD_MSGOBJ_ID {
unsigned SID:11;
unsigned long EID:18;
unsigned SID11:1;
unsigned unimplemented1:2;
} CANFD_MSGOBJ_ID;
/* CAN TX Message Object*/
typedef union _CANFD_TX_MSGOBJ {
struct {
CANFD_MSGOBJ_ID id;
CANFD_TX_MSGOBJ_CTRL ctrl;
CANFD_MSG_TIMESTAMP timeStamp;
} bF;
unsigned int word[4];
unsigned char byte[8];
} CANFD_TX_MSGOBJ;
/* CANFD TEF Message Object */
typedef union _CAN_TEF_MSGOBJ {
struct {
CANFD_MSGOBJ_ID id;
CANFD_TX_MSGOBJ_CTRL ctrl;
CANFD_MSG_TIMESTAMP timeStamp;
} bF;
unsigned int word[4];
} CANFD_TEF_MSGOBJ;

2018 Microchip Technology Inc. DS70005340A-page 79
CAN FD Protocol Module
Example 7-1: Using the Transmit Event FIFO Code (Continued)
int main(void)
{
unsigned char index,fifoSize;
/* Place code to set device speed here. For this example the device speed should be set at
40 MHz (i.e., the device is operating at 40 MIPS). */
ConfigureDeviceClockFor40MIPS(); // FCY = 40MIPS
/* The dsPIC33CH device features I/O remap. This I/O remap configuration for the CAN FD
module can be performed here. */
SetIORemapForECANModule();
/* Set up the CAN clock generater for 40 MIPS and enable the CAN clock generator. */
ConfigureCanfdClockFor40MIPS();
/* Enable the CANFD module */
C1CONLbits.CON = 1;
/* Place CAN module in configuration mode */
C1CONHbits.REQOP = 4;
while(C1CONHbits.OPMOD != 4);
/* Initialize the C1FIFOBA with the start address of the CAN FIFO message buffer area. */
C1FIFOBAL = (unsigned int) &CanTxBuffer;
/* Set up the CANFD module for 1Mbps of Nominal bit rate speed and 2Mbps of Data bit rate. */
/* Set up the CANFD module for 1Mbps of Nominal bit rate speed and 2Mbps of Data bit rate. */
C1NBTCFGH = 0x003E;
C1NBTCFGL = 0x0F0F;
C1DBTCFGH = 0x001E;
C1DBTCFGL = 0x0707;
C1TDCH = 0x0002; //TDCMOD is Auto
C1TDCL = 0x1F00;
/* Configure CANFD module to save transmitted messages in TEF and BRS*/
C1CONLbits.BRSDIS = 0x0;
C1CONHbits.STEF = 0x1;
C1CONHbits.TXQEN = 0x0; // Disable TXQ
/* Configure TEF to save 5 messages*/
C1TEFCONHbits.FSIZE = 0x4; // save 5 messages
C1TEFCONLbits.TEFTSEN = 1;
/* Configure FIFO1 to transmit 5 messages*/
C1FIFOCON1Hbits.FSIZE = 0x4; //5 messages
C1FIFOCON1Hbits.PLSIZE = 0x7; //64 bytes of data
C1FIFOCON1Lbits.TXEN = 0x1; // Set TXEN bit ,transmit fifo
/* Place the CAN module in Normal mode. */
C1CONHbits.REQOP = 0;
while(C1CONHbits.OPMOD != 0);
/* Get the address of the message buffer to write to. Load the buffer and */
/* then set the UINC bit. Set the TXREQ bit to send the message. */
CANFD_TX_MSGOBJ *txObj;
/* Transmit 5 messages from FIFO 1 - CANFD base frame with BRS*/
/* SID = 0x300 , 64 bytes of data */
for (fifoSize= 0; fifoSize < 5; fifoSize++)
{

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 80 2018 Microchip Technology Inc.
Example 7-1: Using the Transmit Event FIFO Code (Continued)
txObj = (CANFD_TX_MSGOBJ *)C1FIFOUA1L;
txObj->bF.id.SID = 0x300;
txObj->bF.id.EID = 0x0000;
txObj->bF.ctrl.BRS = 1 ; //Switch bit rate
txObj->bF.ctrl.DLC = 0xF; //64 bytes
txObj->bF.ctrl.FDF = 1; // CANFD frame
txObj->bF.ctrl.IDE = 0; //Standard frame
txObj->bF.ctrl.SEQ = fifoSize ; //
Sequence does not get transmitted, but stored in TEF
for(index=0;index<0x40;index++ )
{
txObj->byte[index+8] = 0xA5 ; // 64 bytes of 0xA5
}
C1FIFOCON1Lbits.UINC = 1; // Set UINC bit
}
C1FIFOCON1Lbits.TXREQ = 1; // Set TXREQ bit
while (C1FIFOCON1Lbits.TXREQ == 1);
/* Keep reading the TEF objects until the last transmitted message*/
for (fifoSize= 0; fifoSize < 5; fifoSize++)
{
while(C1TEFSTAbits.TEFNEIF ==0);
CANFD_TEF_MSGOBJ *tefObj;
tefObj = (CANFD_TEF_MSGOBJ *)C1TEFUAL;
//ProcessTEFMessages (currentMessageBuffer) ;
C1TEFCONLbits.UINC = 1 ; // Set UINC bit
}
while(1);
}

2018 Microchip Technology Inc. DS70005340A-page 81
CAN FD Protocol Module
8.0 MESSAGE FILTERING
All messages on a CAN network will be received by all nodes. In order to process only messages
of interest, a hardware filtering mechanism is implemented. The CAN FD Protocol Module can
be configured to receive only messages of interest. The module contains 32 acceptance filters.
Each acceptance filter contains a filter object and a mask object. The user application configures
the specific filter to receive a message with a given identifier by setting the filter object and mask
object to match the identifier of the message to be received.
8.1 Filter Configuration
The filters are controlled by the C1FLTCONxL and C1FLTCONxH registers. The filters must be
disabled by clearing the FLTEN bit before changing the filter or mask object; the module need
not be in Configuration mode. After the filter object is updated, the Buffer Pointer, FnBP, has to
be initialized and the filter can be enabled by setting the FLTEN bit. The FnBP points to the
FIFO where the matching receive message needs to be stored.
8.2 Filtering a Received Message
The CAN FD Protocol Module starts acceptance filtering after the arbitration field and when the first
three data bytes of a message are received. Figure 8-1 describes the flow of message filtering.
The module loops through all the filters, starting with Filter 0, which is the highest priority filter.
The message in the Receive Message Assembly Buffer (RXMAB) is compared to the filter and
mask. In case the message matches the filter and it is received without any errors, the message
will be stored into the RX FIFO pointed to by the FnBP. Acceptance filtering is stopped and the
associated RFIF bit is set.
In case an RTR is received, the TXREQ bit of the TX FIFO pointed to by FnBP will be set.
Filtering will continue with the next filter and RXOVIF will be set only when one of the following
happens:
• A filter matches, but the RX FIFO is full.
• When multiple filters match the same message and all matching RX FIFOs are full, only the
RXOVIF of the FIFO pointed to by the highest priority filter will be set.
• The RXOVIF bit will be set if the TX FIFO is empty during an RTR (TXEN = 1, RTREN = 1).
If none of the filters match, the received message will be discarded.
Note: If the module receives a message that matches a filter, but the corresponding FIFO is
a TX FIFO (TXEN = 1, RTREN = 0), the module will discard the received message.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 82 2018 Microchip Technology Inc.
Figure 8-1: Message Filtering Flow
8.2.1 FILTERING STANDARD OR EXTENDED FRAMES
Figure 8-2 illustrates the flow of matching a single filter object to the received message in the
RXMAB.
The filter object can be configured to accept either standard, extended or both frames. If MIDE
is clear, both standard and extended frames will be accepted.
If the filter should only accept standard frames, then MIDE must be set and EXIDE must be
cleared. If the filter should only accept extended frames, then both MIDE and EXIDE must be set.
8.2.2 MASK BITS
The mask object is used to ignore selected bits of the received identifier. The masked bits (mask
bits with a value of ‘0’) of the RXMAB will not be compared with the bits in the filter object. For
example, to receive all messages with Identifiers 0, 1, 2 and 3, it is required to mask the lower
two bits of the identifier by clearing the corresponding bits of the mask object.
Match Filter Object 0
Match Filter Object 1
No
FIFO Not Full?
Index = F0BP
Yes and Not RTR
No
Accept Message:
Receive Rest of Message
Store in FIFO [Index]
Yes
FIFO Not Full?
Index = F1BP
Yes and Not RTR
No
Yes
Match Filter Object 31
FIFO Not Full?
Index = F31BP
Yes and Not RTR
No
Yes
No
Discard Message
Done
No
Yes and RTR
FIFO Not Empty and
TXEN = 1and RTREN = 1?
Index = F0BP
No
Set TXREQ[Index]
Yes
Yes and RTR
FIFO Not Empty and
TXEN = 1and RTREN = 1?
Index = F1BP
Yes and RTR
FIFO Not Empty and
TXEN = 1and RTREN = 1?
Index = F31BP
No
No
Yes
Yes
Arbitration Done and
Required Data Bytes Received
Match Filter Object 2-30
Do the Same

2018 Microchip Technology Inc. DS70005340A-page 83
CAN FD Protocol Module
Figure 8-2: Filter Match
Start Matching
C1MASKxH.MIDE
Set?
Check IDE:
C1FLTOBJxH.EXIDE == RXMAB.IDE?
Yes
No Match
Match
No
RXMAB.IDE == 0?
Base Format:
C1FLTOBJx.SID == RXMAB.SID,
Don’t Care if C1MASKx.MSID[i] = 0
Yes
Extended Format:
C1FLTOBJx.SID == RXMAB.SID,
Don’t Care if C1MASKx.MSID[i] = 0
No
No
Yes
NO Match No MatchNo No
C1FLTOBJx.EID == RXMAB.EID,
Don’t Care if C1MASKx.MEID[i] = 0
Yes
No MatchNo
SID11:
C1TDCH.SID11EN and
C1MASKx.MSID11
Check SID11:
C1FLTOBJxH.SID11 == RXMAB.SID11?
Yes
Yes
Yes
Data Bytes:
C1CONL.DNCNTx > 0?
No
Yes No MatchNo
No
Calculate Number of Bits to Compare:
N = DNCNTx
Calculate Index:
M = 18-N
Assemble Receive Data Bytes:
RXDB = {RXMAB.DB0, RXMAB.DB1, RXMAB.DB2[7:6]}
Compare:
C1FLTOBJm.EID[0:N] == RXDB[17 : M] ?
Don’t Care if C1MASKm.MEID[i] = 0
Yes
No MatchNo
Match
Yes

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 84 2018 Microchip Technology Inc.
8.2.3 FILTERING ON DATA BYTES
When the filter is configured to receive standard frames, the EID part of the filter and mask
object can be selected to filter the data bytes. The DNCNT<4:0> bits in the C1CONL register
are used to select how many bits in the data bytes are compared. Table 8-1 explains how many
data bits are compared, and which filter bits and data bits are compared.
If DNCNTx is:
•‘0’, then data byte filtering is disabled.
• Non-zero, the filtering will commence on as many data bits as specified in DNCNT.x A filter
hit will require matching of the SID bits and a match of n data bits with the filter’s EID<0:17>
bits. Data Byte 0<7> is always compared to EID<0>, Data Byte 0<6> to EID<1>,
Data Byte 2<6> to EID<17>.
• Greater than 18, indicating that the user-selected number of bits is greater than the total
number of EID bits. The filter comparison will terminate with the 18th bit of the data.
• Greater than 16, and the received message has DLC = 2, indicating a payload of two data
bytes. The filter comparison will terminate with the 16th bit of the data.
• Greater than 8, and the received message has DLC = 1, indicating a payload of one data
byte. The filter comparison will terminate with the 8th bit of the data.
• Greater than 0, and the received message has DLC = 0, indicating no data payload. The
filter comparison will terminate with the identifier.
8.2.4 12-BIT STANDARD ID
Setting SID11EN (C1TDCH<8>) allows the use of RRS as bit 12 of the SID (LSB). 12-Bit SID
mode is only available for CAN FD base frames. The filter is extended by SID11 and MSID11.
Data bytes can also be filtered in this mode.
Table 8-1: Data Byte Filter Configuration
DNCNT<4:0>
Received Message Data Bits to be
Compared Byte <bits>
EID Bits Used for
Acceptance Filter
00000 No Comparison No Comparison
00001 Data Byte 0<7> EID<0>
00010 Data Byte 0<7:6> EID<0:1>
00011 Data Byte 0<7:5> EID<0:2>
00100 Data Byte 0<7:4> EID<0:3>
00101 Data Byte 0<7:3> EID<0:4>
00110 Data Byte 0<7:2> EID<0:5>
00111 Data Byte 0<7:1> EID<0:6>
01000 Data Byte 0<7:0> EID<0:7>
01001 Data Byte 0<7:0> and Data Byte 1<7> EID<0:8>
01010 Data Byte 0<7:0> and Data Byte 1<7:6> EID<0:9>
01011 Data Byte 0<7:0> and Data Byte 1<7:5> EID<0:10>
01100 Data Byte 0<7:0> and Data Byte 1<7:4> EID<0:11>
01101 Data Byte 0<7:0> and Data Byte 1<7:3> EID<0:12>
01110 Data Byte 0<7:0> and Data Byte 1<7:2> EID<0:13>
01111 Data Byte 0<7:0> and Data Byte 1<7:1> EID<0:14>
10000 Data Byte 0<7:0> and Data Byte 1<7:0> EID<0:15>
10001 Byte 0<7:0> and Byte 1<7:0> and Byte 2<7> EID<0:16>
10010 to 11111 Byte 0<7:0> and Byte 1<7:0> and Byte 2<7:6> EID<0:17>
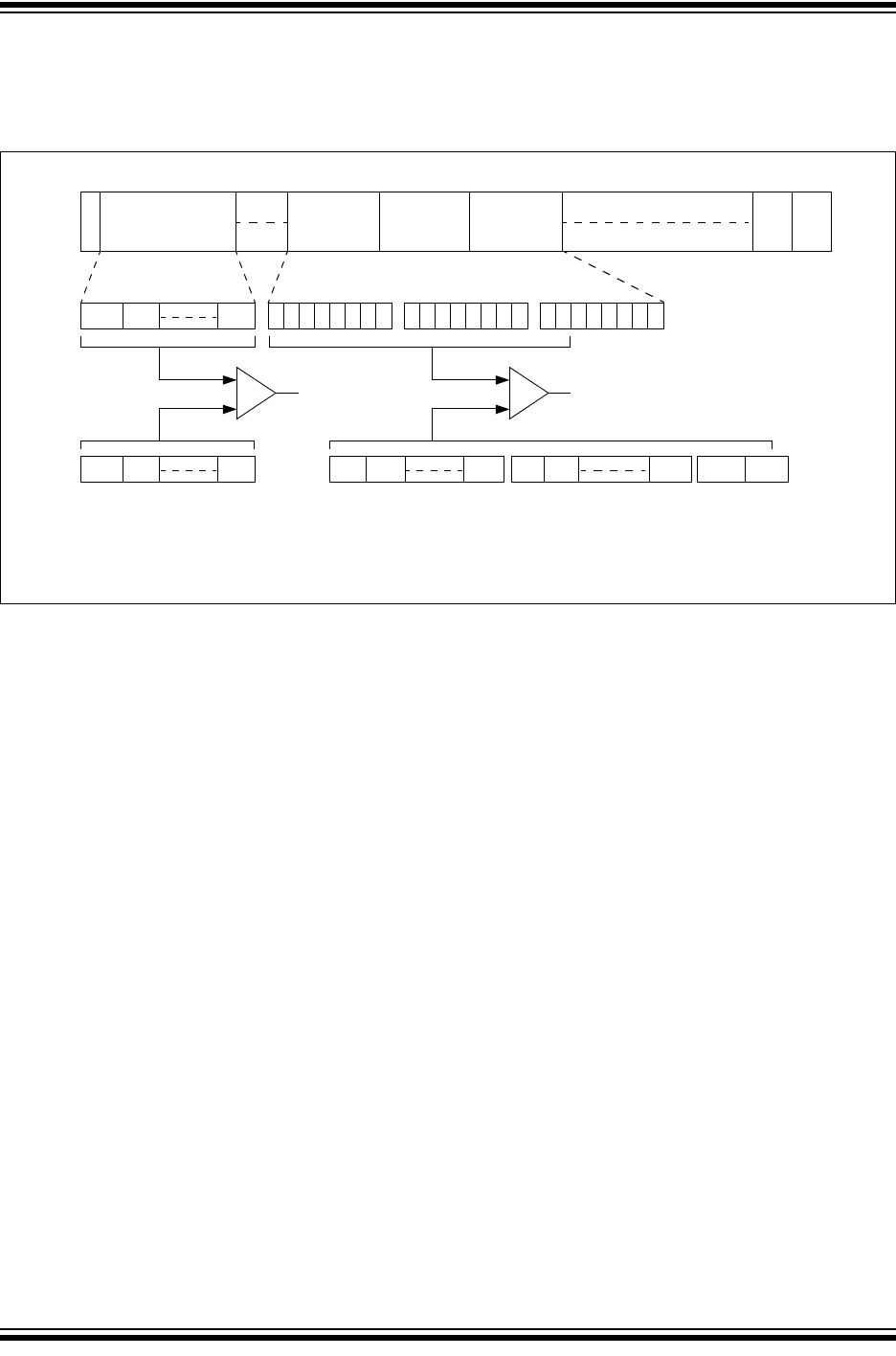
2018 Microchip Technology Inc. DS70005340A-page 85
CAN FD Protocol Module
Figure 8-3 illustrates how the first 18 data bits of the received message data payload are
compared with the corresponding EIDx bits of the message acceptance filter (EID<17:0> bits in
the C1FLTOBJxH/L registers). The IDE bit of the received message must be ‘0’.
Figure 8-3: CAN Operation with DeviceNet™ Filtering
SID10 SID9
S
O
F
IDENTIFIER
11 Bits
EOF
7 Bits 3 Bits
SID0
Accept/Reject Message
IFS
DATA BYTE 0
DATA BYTE 1 DATA BYTE 2
76543210 76543210 76543210
Data Byte 0 Data Byte 1 Data Byte 2MESSAGE SID<10:0>
SID10 SID9 SID0
EID0 EID1 EID7
EID8 EID9 EID15 EID1
6
EID17
STANDARD MESSAGE DATA FRAME
MESSAGE ACCEPTANCE FILTER
SID<10:0>
MESSAGE ACCEPTANCE FILTER
EID<0:17>
Note: The DeviceNet™ filtering configuration shown for the EIDx bits is DNCNT<4:0> = 10010.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 86 2018 Microchip Technology Inc.
9.0 MESSAGE RECEPTION
The application has to configure the RX FIFO before it can be used for reception (see
Section 5.4.4 “Receive FIFO Configuration”). In addition, the application has to configure and
enable at least one filter (see Section 8.1 “Filter Configuration”).
The CAN FD Protocol Module continuously monitors the CAN bus. Messages that match a filter
are stored in the RX FIFO pointed to by the filter (see Section 8.2 “Filtering a Received
Message”). The message data is stored in the receive message objects.
9.1 Receive Message Object
Table 9-1 specifies the receive message object used by the RX FIFOs. The receive objects
contain the message ID, control bits, payload and timestamp.
• SID: Standard Identifier (ID) or Base ID.
• EID: Extended Identifier.
• DLC: Data Length Code; specifies the number of data bytes in the frame (see
Section 2.1.1 “DLC Encoding”).
• IDE: Identifier Extension; IDE = 0 means a Base Identifier frame is received. IDE = 1
means an Extended Identifier frame is received.
• RTR: Remote Transmit Request; this bit is only specified in CAN 2.0 frames. If this bit is
set, the module is requested to respond with a frame transmission.
• FDF: FD Frame; if this bit is set, a CAN FD frame is received; otherwise, a CAN 2.0 frame
is received.
• BRS: Bit Rate Switch; the data phase of a CAN FD frame is received using DBR if this bit is
set. If the bit is clear, the whole frame is received using NBR.
• ESI: Error Status Indicator; the ESI bit reflects the error status of the transmitting node. A
recessive ESI bit in a CAN FD frame indicates that the transmitting node is error passive;
a dominant bit shows that the transmitting node is error active.
• FILHIT: Indicates the number of the filter that matched the received message.
• RXMSGTS: Timestamp of the Received Message; timestamping can be enabled for each
RX FIFO individually using RXTSEN (C1FIFOCONxL<5>). The receive message object
will not contain RXMSGTS if timestamping is disabled.
• Receive Buffer Data: contains the payload of the message. The maximum payload is
configured by the PLSIZEx bits (C1FIFOCONxH<15:13>.
9.1.1 READING A RECEIVE MESSAGE OBJECT
Before reading a receive message object, the application must ensure that the RX FIFO is not
empty by reading the C1FIFOSTAx register. The RX FIFO is not empty if TFNRFNIF is set.
The RX FIFO user address (C1FIFOUAxH/L) points to the RAM of the next receive message
object to read. R0 of the receive message object is read first, followed by R1, R2 and so on.
After the receive message object is read from RAM, the RX FIFO needs to be incremented by
setting the UINC bit (C1FIFOCONxL<8>). This will make the CAN FD Protocol Module increment
to the tail of the FIFO and update C1FIFOUAxH/L.
Now the application can read the next message from the RX FIFO.

2018 Microchip Technology Inc. DS70005340A-page 87
CAN FD Protocol Module
Table 9-1: Receive Message Object
Words Bits Bit 15/7 Bit 14/6 Bit 13/5 Bit 12/4 Bit 11/3 Bit 10/2 Bit 9/1 Bit 8/0
R0
15:8 EID<4:0> SID<10:8>
7:0 SID<7:0>
R1
15:8
— — SID11 EID<17:6>
7:0 EID<12:5>
R2
15:8 FILHIT<4:0>
-— -— ESI
7:0 FDF BRS RTR IDE DLC<3:0>
R3
15:8 — — — — — — — —
7:0
— — — — — — — —
R4
(2)
15:8 RXMSGTS<15:8>
7:0 RXMSGTS<7:0>
R5
(2)
15:8 RXMSGTS<31:24>
7:0 RXMSGTS<23:16>
R6
(1)
15:8 Receive Data Byte 1
7:0 Receive Data Byte 0
R7
(1)
15:8 Receive Data Byte 3
7:0 Receive Data Byte 2
R8
15:8 Receive Data Byte 5
7:0 Receive Data Byte 4
R9
15:8 Receive Data Byte 7
7:0 Receive Data Byte 6
Ri-1
15:8 Receive Data Byte n-2
7:0 Receive Data Byte n-3
Ri
15:8 Receive Data Byte n
7:0 Receive Data Byte n-1
bit 15-11 (R0) EID<4:0>: Extended Identifier bits
bit 10-0 (R0) SID<10:0>: Standard Identifier bits
bit 15-14 (R1) Unimplemented: Read as ‘x’
bit 13 (R1) SID11: In FD mode, the Standard ID can be extended to 12 bits using r1
bit 12-0 (R1) EID<17:5>: Extended Identifier bits
bit 15-11 (R2) FILHIT<4:0>: Filter Hit bits; hits the number of filters that matched
bit 10-9 (R2) Unimplemented: Read as ‘x’
bit 8 (R2) ESI: Error Status Indicator bit
In CAN to CAN Gateway mode (ESIGM = 1), the transmitted ESI flag is a “logical OR” of ESI (T1) and
the error passive state of the CAN controller.
In Normal mode, ESI indicates the error status:
1 = Transmitting node is error passive
0 = Transmitting node is error active
bit 7 (R2) FDF: FD Frame bit; distinguishes between CAN and CAN FD formats
bit 6 (R2) BRS: Bit Rate Switch bit; selects if Data Bit Rate is switched
bit 5 (R2) RTR: Remote Transmission Request bit; not used in CAN FD
bit 4 (R2) IDE: Identifier Extension bit; distinguishes between base and extended format
bit 3-0 (R2) DLC<3:0>: Data Length Code bits
bit 15:0 (R3) Unimplemented: Read as ‘x’
bit 15:0 (R4) RXMSGTS<15:0>: Receive Message Timestamp bits
bit 15:0 (R5) RXMSGTS<31:16>: Receive Message Timestamp bits
Note 1: Receive Message Object: Data Bytes 0-n; payload size is configured individually with the PLSIZE<2:0> bits.
2: R2 (RXMSGTSx) only exits in objects where RXTSEN is set.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 88 2018 Microchip Technology Inc.
9.2 Receive State Diagram
Figure 9-1 illustrates how messages are received. It illustrates how the most important receive
flags are set and cleared.
• The CAN FD Protocol Module remains Idle until a SOF is detected.
• After a SOF is detected, the module will receive the arbitration and control fields.
• Based on the DNCNTx bits and the received DLC, acceptance filtering will start. See
Figure 8-1 for more details.
• If none of the filters match, the message will still be received, but it will not be stored.
• If a filter matches, the device checks whether the receive object the filter points to is full.
• If the receive object is full, the RXOVIF bit will be set.
• If the receive object is not full, the rest of the data bytes are received and stored to the
receive object.
• If a complete message is received, the message will be stored, a timestamp will be
attached and the receive flags will be set; the FIFO status flags will be updated and the
FIFO head will be incremented.
• In case an error is detected during the reception of a message, an error frame will be
transmitted and the appropriate error flags will be set.
Figure 9-1: Receive State Diagram
Error
Success
Error
Success
Error
Success
Error
Yes
No
Success
Yes
No
Yes
No
Success
Error
SOF
Idle
Receive
Arbitration and
CTRL Field
Transmit Error
Frame
Set Error Flags
c
Filter Match?
Store Message to
Object
Set RXIF
c
Object Full?
RXIF Set?
Set RXOVIF
c
DNCNTx > 0 and DLC > 0?
Receive
Data Bytes 0-3
Receive Remaining
Data Bytes
and Store them
Receive Rest of
Message
Receive Rest of
Message

2018 Microchip Technology Inc. DS70005340A-page 89
CAN FD Protocol Module
9.3 Resetting RX FIFO
A receive FIFO can be reset by:
• Setting FRESET (C1FIFOCONxL<10>) or
• Placing the module in Configuration mode (OPMOD<2:0> = 100)
Resetting the FIFO will reset the Head and Tail Pointers, and the C1FIFOSTAx register. The
settings in the C1FIFOCONxH/L registers will not change.
Before resetting an RX FIFO using FRESET, ensure that no enabled filter is pointing to the FIFO.
9.4 Mismatch of DLC and Payload Size During Reception
The PLSIZEx bits reserve a certain number of bytes in the receive message object. The module
handles mismatches between DLC and payload size as follows:
• If the number of bytes specified by the DLC is smaller than the number of bytes specified
by the PLSIZEx bits, the received message bytes will be stored in the message object,
without any padding.
• If the number of bytes specified by the DLC is bigger than the number of bytes specified by
the PLSIZEx bits, the data bytes that fit in the receive message object are stored and the
other data bytes that do not fit are discarded. The module ensures that the next message
object in RAM does not get overwritten. The module will store the message in the receive
object and the RX FIFO status flags will be updated. In addition, the IVMIF (C1INTL<15>)
and DLCMM flags (C1BDIAG1H<15>) will be set.
9.5 Message Reception Code Example
A code example to receive the CAN FD extended frame using Filter 0, and saving the messages
in FIFO 1, is shown in Example 9-1.
Example 9-1: Message Reception Code
#include <xc.h>
/* This code example demonstrates a method to configure the CAN FD module to receive the extended ID
CAN FD messages. This uses CAN1, FIFO1 and filter 0. FIFO1 is configured to receive 2 messages. */
/* Include fuse configuration code here. */
#define MAX_WORDS 100
unsigned int __attribute__((aligned(4)))CanRxBuffer[MAX_WORDS];
/*data structure to implement a CANFD message buffer. */
/* CANFD Message Time Stamp */
typedef unsigned long CANFD_MSG_TIMESTAMP;
/* CANFD RX Message Object Control*/
typedef struct _CANFD_RX_MSGOBJ_CTRL {
unsigned DLC:4;
unsigned IDE:1;
unsigned RTR:1;
unsigned BRS:1;
unsigned FDF:1;
unsigned ESI:1;
unsigned unimplemented1:2;
unsigned FilterHit:5;
unsigned unimplemented2:16;
} CANFD_RX_MSGOBJ_CTRL;

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 90 2018 Microchip Technology Inc.
Example 9-1: Message Reception Code (Continued)
/* CANFD RX Message ID*/
typedef struct _CANFD_MSGOBJ_ID {
unsigned SID:11;
unsigned long EID:18;
unsigned SID11:1;
unsigned unimplemented1:2;
} CANFD_MSGOBJ_ID;
/* CANFD RX Message Object */
typedef union _CANFD_RX_MSGOBJ {
struct {
CANFD_MSGOBJ_ID id;
CANFD_RX_MSGOBJ_CTRL ctrl;
CANFD_MSG_TIMESTAMP timeStamp;
} bF;
unsigned int word[4];
unsigned char byte[8];
} CANFD_RX_MSGOBJ;
int main(void)
{
/* Place code to set device speed here. For this example the device speed should be set at 40 MHz
(i.e., the device is operating at 40 MIPS). */
ConfigureDeviceClockFor40MIPS(); // FCY = 40MIPS
/* The dsPIC33CH device features I/O remap. This I/O remap configuration for the CAN FD module
can be performed here. */
SetIORemapForECANModule();
/* Set up the CAN clock generator for 40 MIPS and enable the CAN clock generator. */
ConfigureCanfdClockFor40MIPS();
/* Enable the CANFD module */
C1CONLbits.CON = 1;
/* Place CAN module in configuration mode */
C1CONHbits.REQOP = 4;
while(C1CONHbits.OPMOD != 4);
/* Initialize the C1FIFOBA with the start address of the CAN FIFO message buffer area. */
C1FIFOBAL = (unsigned int) &CanRxBuffer;
/* Set up the CANFD module for 1 Mbps of Nominal bit rate speed and 2 Mbps of Data bit rate. */
C1NBTCFGH = 0x003E;
C1NBTCFGL = 0x0F0F;
C1DBTCFGH = 0x001E;
C1DBTCFGL = 0x0707;
C1TDCH = 0x0002; //TDCMOD is Auto
C1TDCL = 0x1F00;
/* Configure CANFD module to enable BRS */
C1CONLbits.BRSDIS = 0x0;
C1CONHbits.STEF = 0x0; //Don't save transmitted messages in TEF
C1CONHbits.TXQEN = 0x0; // No TXQ
/* Configure FIFO1 to Receive 2 messages*/
C1FIFOCON1Hbits.FSIZE = 0x1; //2 messages
C1FIFOCON1Hbits.PLSIZE = 0x7; //64 bytes of data
C1FIFOCON1Lbits.TXEN = 0x0; //Receive fifo

2018 Microchip Technology Inc. DS70005340A-page 91
CAN FD Protocol Module
Example 9-1: Message Reception Code (Continued)
/* Configure filter 0 and MASK 0 to accept extended id messages with id = 2 and 3 */
C1FLTCON0Lbits.F0BP = 1; // message stored in FIFO1
C1FLTOBJ0L = 0x1000; // EID = 0x00002
C1FLTOBJ0H = 0x4000; // Match messages with extended identifier address
C1MASK0L = 0xF7FF; // MEID = 0x1FFFE - Last it is 0
C1MASK0H = 0xFFFF; // Match message types
C1FLTCON0Lbits.FLTEN0 = 1; // Enable the filter 0
/* Place the CAN module in Normal mode. */
C1CONHbits.REQOP = 0;
while(C1CONHbits.OPMOD != 0);
/* Get the address of the message buffer to read the received messages.*/
/* set UINC bit to update the FIFO tail */
CANFD_RX_MSGOBJ *rxObj;
rxObj = (CANFD_RX_MSGOBJ *)C1FIFOUA1L;
while(C1FIFOSTA1bits.TFNRFNIF ==0);
//Process the received messages
C1FIFOCON1Lbits.UINC = 1; // Update the FIFO message pointer.
while(1);
}

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 92 2018 Microchip Technology Inc.
10.0 FIFO BEHAVIOR
This section explains the FIFO behavior when TEF and TXQ are enabled. FIFO 1 is configured
as a TX FIFO and FIFO 2 as an RX FIFO. The remaining FIFOs are not configured.
Table 10-1: Example FIFO Configuration
10.1 FIFO Status Flags
FIFO 1 through FIFO 31 can be configured as transmit or receive FIFOs. The same status flags
in C1FIFOSTAx are used for transmit and receive FIFOs. The status flags behave differently
based on the selected configuration.
10.1.1 TX FIFO STATUS FLAGS
There are three transmit status flags:
• TFEIF (TFE
RFFIF): Transmit FIFO Empty Interrupt Flag; set when the FIFO is empty.
• TFHIF (TFHRFHIF): Transmit FIFO Half Empty Interrupt Flag; set when FIFO is less than half full.
• TFNIF (TFNRFNIF): Transmit FIFO Not Full Interrupt Flag; set when FIFO is not full.
The status flags of a transmit FIFO are set when there is space to load a new message object
into the FIFO. Before the first message object is loaded (after the FIFO is reset), all status flags
are set. When the FIFO is fully loaded, all flags are cleared.
10.1.2 RX FIFO STATUS FLAGS
There are three receive status flags:
• RFFIF (TFERFFIF
): Receive FIFO Full Interrupt Flag; set when the FIFO is full.
• RFHIF (TFHRFHIF
): Receive FIFO Half Full Interrupt Flag; set when the FIFO is at least half full.
•RFNIF (TFNRFNIF): Receive FIFO Not Empty Interrupt Flag; set when there is at least one
message in the FIFO.
The status flags of the receive FIFO are set when there are received messages in the FIFO.
Before the first message is received (after the FIFO is reset), all status flags are cleared. When
the FIFO is full, all flags are set.
10.1.3 TXQ STATUS FLAGS
There are two TXQ status flags:
• TXQEIF: TXQ Empty Interrupt Flag; set when the TXQ is empty.
• TXQNIF: TXQ Not Full Interrupt Flag; set when TXQ is not full.
The status flags of the TXQ are set when there is space to load a new message object into the
TXQ. Before the first message object is loaded (after the TXQ is reset), all status flags are set.
When the TXQ is fully loaded, all flags are cleared.
Note 1: The start addresses are calculated based on the number of objects in the FIFO and
the PLSIZEx bits.
2: The start addresses of the FIFOs given in Table 10-1 are calculated when TEF
starts at 0x1400.
FIFO
Objects
in FIFO
Payload
per Object
Timestamp
Bytes in
Object
Bytes in
FIFO
Start Address
TEF 12 N/A Yes 12 144 0x1400
TXQ 8 32 N/A 40 320 0x1490
FIFO 1 5 64 N/A 72 360 0x15D0
FIFO 2 16 64 Yes 76 1216 0x1738
FIFO 3 N/A — — — — 0x1BF8

2018 Microchip Technology Inc. DS70005340A-page 93
CAN FD Protocol Module
10.1.4 TEF STATUS FLAGS
There are four TEF status flags:
• TEFFIF: TEF Full Interrupt Flag; set when the TEF is full.
• TEFHIF: TEF Half Full Interrupt Flag; set when the TEF is at least half full.
• TEFNEIF: TEF Not Empty Interrupt Flag; set when there is at least one message in the TEF.
• TEFOVIF: TEF Overrun Interrupt Flag; set when overflow has occurred.
The status flags of the TEF are set when there are transmitted messages in the FIFO. Before the
first message is stored (after the TEF is reset), all status flags are cleared. When the TEF is full,
all flags are set.
10.2 Transmit FIFO Behavior
FIFO 1 is configured as a TX FIFO. C1FIFOCON1L and C1FIFOCON1H are used to control the
FIFO. C1FIFOSTA1 contains the status flags and the FIFO Index bits (FIFOCI<4:0>).
C1FIFOUA1L and C1FIFOUA1H contain the user address of the next transmit message object
to be loaded.
Figure 10-1 through Figure 10-6 illustrate how the status flags, user address and FIFO index are
updated for FIFO 1.
Figure 10-1 shows the status of FIFO 1 after Reset. Message objects, MO0 to MO4, are empty.
All status flags are set. The user address and the FIFO index point to MO0.
Figure 10-1: FIFO 1 – Initial State
Figure 10-2 illustrates the status of FIFO 1 after the first message (MSG0) is loaded. MO0 now
contains MSG0. The user application sets the UINC bit (C1FIFOCON1L<8>), which causes the
FIFO head to advance. The user address now points to MO1. TFEIF is cleared since the FIFO
is no longer empty. The user application now sets TXREQ to request the transmission of MSG0.
Figure 10-2: FIFO 1 – First Message Loaded
MO0
MO1
MO2
MO3
MO4
C1FIFOUA1L = 0x1D0
C1FIFOSTA1:
FIFOCIx = 0
TFEIF = 1
TFHIF = 1
TFNIF = 1
C1FIFOCON1L:
TXREQ = 0
MO0/MSG0
MO1
MO2
MO3
MO4
C1FIFOUA1L = 0x218
C1FIFOSTA1:
FIFOCIx = 0
TFEIF = 0
TFHIF = 1
TFNIF = 1
C1FIFOCON1L:
TXREQ = 1

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 94 2018 Microchip Technology Inc.
Figure 10-3 illustrates the status of FIFO 1 after MSG0 is transmitted. The FIFO is empty again.
TFEIF is set and TXREQ is cleared. FIFOCIx bits now point to MO1 with user address 0x218.
Figure 10-3: FIFO 1 – First Message Transmitted
Figure 10-4 illustrates the status of FIFO 1 after three more messages are loaded: MSG1-MSG3. The
user address now points to MO4. TFHIF is cleared because the FIFO is now less than half empty.
Figure 10-4: FIFO 1 – Three More Messages Loaded
Figure 10-5 illustrates the status of FIFO 1 after two more messages are loaded: MSG4 and
MSG5. C1FIFOUA1L now points to MO1. All status flags are now cleared because the FIFO is
full. The user address and the FIFO index now point to MO1. The user application now sets
TXREQ to request the transmission of MSG1-MSG5.
Figure 10-5: FIFO 1 – FIFO Fully Loaded
MO0
MO1
MO2
MO3
MO4
C1FIFOUA1L = 0x218
C1FIFOSTA1:
FIFOCIx = 1
TFEIF = 1
TFHIF = 1
TFNIF = 1
C1FIFOCON1L:
TXREQ = 0
MO0
MO1/MSG1
MO2/MSG2
MO3/MSG3
MO4
C1FIFOUA1L = 0x2F0
C1FIFOSTA1:
FIFOCIx = 1
TFEIF = 0
TFHIF = 0
TFNIF = 1
C1FIFOCON1L:
TXREQ = 0
MO0/MSG5
MO1/MSG1
MO2/MSG2
MO3/MSG3
MO4/MSG4
C1FIFOUA1L = 0x218
C1FIFOSTA1:
FIFOCIx = 1
TFEIF = 0
TFHIF = 0
TFNIF = 0
C1FIFOCON1L:
TXREQ = 1

2018 Microchip Technology Inc. DS70005340A-page 95
CAN FD Protocol Module
Figure 10-6 illustrates the status of FIFO 1 after MSG1-MSG5 are transmitted. The FIFO is
empty again. All status flags are set and TXREQ is cleared. The user address and the FIFO index
point to MO1 again.
Figure 10-6: FIFO 1 – FIFO Fully Transmitted
10.3 Receive FIFO Behavior
FIFO 2 is configured as an RX FIFO. C1FIFOCON2L and C1FIFOCON2H are used to control
the FIFO. C1FIFOSTA2 contains the status flags and the FIFO index (FIFOCIX). C1FIFOUA2L
and C1FIFOUA2H contain the user address of the next message object to read.
Figure 10-7 through Figure 10-14 illustrate how the status flags, user address and FIFO index
are updated.
Figure 10-7 shows the status of FIFO 2 after the Reset. Message objects, MO0 to MO15, are
empty. All status flags are cleared. The user address and the FIFO index point to MO0.
Figure 10-7: FIFO 2 – Initial State
Figure 10-8 illustrates the status of FIFO 2 after the first message (MSG0) is received. MO0 now
contains MSG0. The FIFO index now points to MO1. RFNIF is set since the FIFO is not empty
anymore.
Figure 10-8: FIFO 2 – First Message Received
Figure 10-9 illustrates the status of FIFO 2 after MSG0 is read. The user application reads the
message from RAM and sets the UINC bit (C1FIFOCON2L<8>). The user address increments
and points to MO1. The FIFO index is unchanged. The FIFO is empty again. All flags are cleared.
MO0
MO1
MO2
MO3
MO4
C1FIFOUA1L = 0x218
C1FIFOSTA1:
FIFOCIx = 1
TFEIF = 1
TFHIF = 1
TFNIF = 1
C1FIFOCON1L:
TXREQ = 0
MO0
MO1
MO2
MO15
C1FIFOUA2L = 0x338
C1FIFOSTA2:
FIFOCIx = 0
RFFIF = 0
RFHIF = 0
RFNIF = 0
RXOVIF = 0
MO0/MSG0
MO1
MO2
MO15
C1FIFOUA2L = 0x338
C1FIFOSTA2:
FIFOCIx = 1
RFFIF = 0
RFHIF = 0
RFNIF = 1
RXOVIF = 0

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 96 2018 Microchip Technology Inc.
Figure 10-9: FIFO 2 – First Message Read
Figure 10-10 illustrates the status of FIFO 2 after eight more messages are received: MSG1-MSG8.
The user address still points to MO1. RFNIF and RFHIF are set because the FIFO is now half full.
The FIFO index points to MO9.
Figure 10-10: FIFO 2 – Half Full
Figure 10-11 illustrates the status of FIFO 2 after 10 more messages are received: MSG5-MSG15.
The user address still points to MO1. The FIFO index points to MO0. RFNIF and RFHIF are set.
Figure 10-11: FIFO 2 – FIFO Almost Full
MO0
MO1
MO2
MO15
C1FIFOUA2L = 0x384
C1FIFOSTA2:
FIFOCIx = 1
RFFIF = 0
RFHIF = 0
RFNIF = 0
RXOVIF = 0
MO0
MO1/MSG1
MO2/MSG2
C1FIFOUA2L = 0x384
C1FIFOSTA2:
FIFOCIx = 0
RFFIF = 0
RFHIF = 1
RFNIF = 1
RXOVIF = 0
MO15
MO8/MSG8
MO9
MO10
MO0
MO1/MSG1
MO2/MSG2
MO15/MSG15
C1FIFOUA2L = 0x384
C1FIFOSTA2:
FIFOCIx = 0
RFFIF = 0
RFHIF = 1
RFNIF = 1
RXOVIF = 0

2018 Microchip Technology Inc. DS70005340A-page 97
CAN FD Protocol Module
Figure 10-12 illustrates the status of FIFO 2 after one more message is received: MSG16. All
status flags are set because the FIFO is full. The user address and the FIFO index point to MO1.
Figure 10-12: FIFO 2 – FIFO Full
Figure 10-13 illustrates the status of FIFO 2 after one more message is received. Since FIFO 2
is already full, an overflow occurs. The message is discarded and RXOVIF is set. The user
address and FIFO index has not changed.
Figure 10-13: FIFO 2 – FIFO Overflow
Figure 10-14 illustrates the status of FIFO 2 after the application cleared RXOVIF and read two
more messages. RFFIF is clear because the FIFO is not full anymore. The user address points
to MO3. The FIFO index has not changed.
Figure 10-14: FIFO 2 – Two More Messages Read
MO0/MSG16
MO1/MSG1
MO2/MSG2
MO15/MSG15
C1FIFOUA2L = 0x384
C1FIFOSTA2:
FIFOCIx = 1
RFFIF = 1
RFHIF = 1
RFNIF = 1
RXOVIF = 0
MO0/MSG16
MO1/MSG1
MO2/MSG2
MO15/MSG15
C1FIFOUA2L = 0x384
C1FIFOSTA2:
FIFOCIx = 1
RFFIF = 1
RFHIF = 1
RFNIF = 1
RXOVIF = 1
MO0/MSG16
MO1
MO2
MO15/MSG15
C1FIFOUA2L = 0x41C
C1FIFOSTA2:
FIFOCIx = 1
RFFIF = 0
RFHIF = 1
RFNIF = 1
RXOVIF = 0
MO3/MSG3
MO4/MSG4

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 98 2018 Microchip Technology Inc.
10.4 Transmit Queue Behavior
C1TXQCONL and C1TXQCONH are used to control the TXQ. C1TXQSTA contains the status
flags and the TXQ index (TXQCIx). C1TXQUAL and C1TXQUAH contain the user address of the
next transmit message object to be loaded.
The TXQCI<4:0> bits are used by the CAN FD Protocol Module to calculate the next message
to transmit. TXQCIx bits are not incremented linearly. They are recalculated every time a
message gets transmitted or TXREQ gets set.
Figure 10-15 through Figure 10-20 illustrate how the status flags and user address are updated.
There is no need for the user application to use TXQCIx; therefore, it is not shown in the figures.
Figure 10-15 shows the status of the TXQ after Reset. Message objects, MO0 to MO7, are
empty. All status flags are set. The user address points to MO0.
Figure 10-15: TXQ – Initial State
Figure 10-16 illustrates the status of the TXQ after the first message (MSG0) is loaded. MO0 now
contains MSG0. The user application sets the UINC bit, which causes the FIFO head to advance.
The user address now points to MO1. TXQEIF is cleared, since the queue is not empty anymore.
The user application now sets TXREQ to request the transmission of MSG0.
Figure 10-16: TXQ – First Message Loaded
Figure 10-17 illustrates the status of the TXQ after MSG0 is transmitted. The TXQ is empty again.
TXQEIF is set and TXREQ is cleared. The user address still points to MO1 because UINC is not set.
Figure 10-17: TXQ – First Message Transmitted
Figure 10-18 illustrates the status of the TXQ after MSG1 is loaded and UINC is set. The user
address now points to the next free message object: MO0.
MO0
MO1
MO2
MO7
C1TXQUAL = 0x090
C1TXQSTA:
TXQEIF = 1
TXQNIF = 1
C1TXQCONL:
TXREQ = 0
MO0/MSG0
MO1
MO2
MO7
C1TXQUAL = 0x0B8
C1TXQSTA:
TXQEIF = 0
TXQNIF = 1
C1TXQCONL:
TXREQ = 1
MO0
MO1
MO2
MO7
C1TXQUAL = 0x0B8
C1TXQSTA:
TXQEIF = 1
TXQNIF = 1
C1TXQCONL:
TXREQ = 0

2018 Microchip Technology Inc. DS70005340A-page 99
CAN FD Protocol Module
Figure 10-18: TXQ – Next Message Loaded
Figure 10-19 illustrates the status of the TXQ after six more messages are loaded: MSG2-MSG7.
The user address now points to the last free message object: MO7.
Figure 10-19: TXQ – Next Six Messages Loaded
Figure 10-20 illustrates the status of the TXQ after MSG8 is loaded, and UINC is set. The TXQ
is now full, all flags are cleared. The user address now points to MO0. The user application now
sets TXREQ. The messages will be transmitted based on the priority of their IDs.
Figure 10-20: TXQ – Full
10.5 Transmit Event FIFO Behavior
C1TEFCONL and C1TEFCONH are used to control the TEF. C1TEFSTA contains the status
flags. C1TEFUAL and C1TEFUAH contain the user address of the next message object to read.
The actual RAM address is calculated using Equation 7-1.
MO0
MO1/MSG1
MO2
MO7
C1TXQUAL = 0x090
C1TXQSTA:
TXQEIF = 0
TXQNIF = 1
C1TXQCONL:
TXREQ = 0
MO0/MSG2
MO1/MSG1
MO2/MSG3
C1TXQUAL = 0x1A8
C1TXQSTA:
TXQEIF = 0
TXQNIF = 1
C1TXQCONL:
TXREQ = 0
MO3/MSG4
MO4/MSG5
MO5/MSG6
MO6/MSG7
MO7
MO0/MSG2
MO1/MSG1
MO2/MSG3
C1TXQUAL = 0x090
C1TXQSTA:
TXQEIF = 0
TXQNIF = 0
C1TXQCONL:
TXREQ = 1
MO3/MSG4
MO4/MSG5
MO5/MSG6
MO6/MSG7
MO7/MSG8

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 100 2018 Microchip Technology Inc.
Figure 10-21 through Figure 10-28 illustrate how the status flags and user address are updated.
The TEF stores transmitted messages; therefore, the flags behave similarly to an RX FIFO.
Figure 10-21 shows the status of the TEF after Reset. Message objects, MO0 to MO11, are
empty. All status flags are cleared. The user address points to MO0.
Figure 10-21: TEF – Initial State
Figure 10-22 shows the status of the TEF after the first transmit message is stored. MO0 contains
ID0, the ID of MSG0. TEFNEIF is set since the TEF is not empty. The user address points to
MO0.
Figure 10-22: TEF – First Transmit Message is Stored
Figure 10-23 illustrates the status of the TEF after ID0 is read. The user application reads the ID
from RAM and sets the UINC bit (C1TEFCONL<8>). The user address increments and points to
MO1. The TEF is empty again. All flags are cleared.
Figure 10-23: TEF – First ID Read
MO0
MO1
MO2
MO11
C1TEFUAL = 0x000
C1TEFSTA:
TEFFIF = 0
TEFHIF = 0
TEFNEIF = 0
TEFOVIF = 0
MO0/ID0
MO1
MO2
MO11
C1TEFUAL = 0x000
C1TEFSTA:
TEFFIF = 0
TEFHIF = 0
TEFNEIF = 1
TEFOVIF = 0
MO0
MO1
MO2
MO11
C1TEFUAL = 0x00C
C1TEFSTA:
TEFFIF = 0
TEFHIF = 0
TEFNEIF = 0
TEFOVIF = 0

2018 Microchip Technology Inc. DS70005340A-page 101
CAN FD Protocol Module
Figure 10-24 illustrates the status of the TEF after six more messages are transmitted: MSG1-MSG6.
The user address points to MO1. TEFNEIF and TEFHIF are set because the TEF is now half full.
Figure 10-24: TEF – Half Full
Figure 10-25 illustrates the status of the TEF after five more messages are transmitted:
MSG7-MSG11. The user address still points to MO1. TEFNEIF and TEFHIF are set.
Figure 10-25: TEF – Almost Full
Figure 10-26 illustrates the status of the TEF after one more message is transmitted: MSG12. All
status flags are set because the TEF is full. The user address points to MO1.
Figure 10-26: TEF – Full
MO0
MO1/ID1
MO2/ID2
C1TEFUAL = 0x00C
C1TEFSTA:
TEFFIF = 0
TEFHIF = 1
TEFNEIF = 1
TEFOVIF = 0
MO11
MO6/ID6
MO7
MO8
MO0
MO1/ID1
MO2/ID2
MO11/ID11
C1TEFUAL = 0x00C
C1TEFSTA:
TEFFIF = 0
TEFHIF = 1
TEFNEIF = 1
TEFOVIF = 0
MO0/ID12
MO1/ID1
MO2/ID2
MO11/ID11
C1TEFUAL = 0x00C
C1TEFSTA:
TEFFIF = 1
TEFHIF = 1
TEFNEIF = 1
TEFOVIF = 0

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 102 2018 Microchip Technology Inc.
Figure 10-27 illustrates the status of the TEF after one more message is transmitted. Since the
TEF is already full, an overflow occurs. The ID is discarded and TEFOVIF is set. The user
address remains unchanged.
Figure 10-27: TEF – Overflow
Figure 10-28 illustrates the status of the TEF after the application cleared TEFOVIF and read one
more message. TEFFIF is clear because the TEF is not full anymore. The user address points
to MO2.
Figure 10-28: TEF – One More ID Read
MO0/ID12
MO1/ID1
MO2/ID2
MO11/ID11
C1TEFUAL = 0x00C
C1TEFSTA:
TEFFIF = 1
TEFHIF = 1
TEFNEIF = 1
TEFOVIF = 1
MO1
MO2/ID2
MO3/ID3
MO11/ID11
C1TEFUAL = 0x018
C1TEFSTA:
TEFFIF = 0
TEFHIF = 1
TEFNEIF = 1
TEFOVIF = 0
MO0/ID12

2018 Microchip Technology Inc. DS70005340A-page 103
CAN FD Protocol Module
11.0 TIMESTAMPING
The CAN FD Protocol Module contains a Time Base Counter (TBC). The TBC is a 32-bit free-running
counter that increments on multiples of SYSCLK and rolls over to zero when:
• TBCPRE<9:0> bits (C1TSCONL<9:0>) are used to configure the prescaler for the TBC.
• Setting TBCEN (C1TSCONH<0>) enables the TBC.
• Clearing TBCEN disables, stops and resets the TBC.
• The TBC has to be disabled before writing to C1TBCH/L by clearing TBCEN.
• TEFTSEN (C1TEFCONL<5>) has to be set to timestamp messages in the TEF.
• RXTSEN (C1FIFOCONxL<5>) has to be set to timestamp messages in the individual
RX FIFO.
• The application can read C1TBCH/L at any time. Similar to any multibyte counter, the
application has to consider that the counter increments and might roll over while reading
different bytes of the counter.
All timestamps are 32 bits, allowing timestamps to be used for system time synchronization with
high resolution.
A rollover of the TBC will generate an interrupt if TBCIE is set.
Messages can be timestamped either at the beginning of a frame or at the end, depending on
the TSEOF bit (C1TSCONH<1>). When TSEOF = 0, TSRES (C1TSCONH<2>) specifies if FD
frames are timestamped at SOF or the “reserved bit”. Table 11-1 specifies the reference points
when the timestamping occurs. At the reference point, the value of the TBC (C1TBCH/L) is
captured and stored into the message object:
• Receive Message Object: The TBC value is stored in the RXMSGTSx bits (see Tabl e 9- 1 )
• TEF Object: The TBC value is stored in the TXMSGTSx bits (see Table 7 - 1 )
Table 11-1: Reference Point
Frame CAN 2.0 CAN FD
Start of TX Sample point of SOF Sample point of SOF or the bit after FDF
Start of RX Sample point of SOF Sample point of SOF or the bit after FDF
Valid TX No error till end of EOF No error till end of EOF
Valid RX No error till the last, but one bit of
EOF
No error till the last, but one bit of EOF

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 104 2018 Microchip Technology Inc.
12.0 INTERRUPTS
Interrupts can be classified into multiple layers. Lower layer interrupts propagate to higher
layers by multiplexing them into single interrupts. Figure 12-1 illustrates the layers of interrupts.
• FIFO Individual Interrupts
• FIFO Combined Interrupts
• Main Interrupts
These interrupts are then funneled into three separate module interrupts:
• Receive Interrupt
• Transmit Interrupt
• Information Interrupt
All module interrupts are persistent, meaning the condition that caused the interrupt must be
cleared within the module for the interrupt request to be removed.

2018 Microchip Technology Inc. DS70005340A-page 105
CAN FD Protocol Module
Figure 12-1: Interrupt Multiplexing
RX Interrupt
Interrupt PinsMain InterruptsFIFO Combined
Interrupts
FIFO Individual
Interrupts
C1TXQCONL, C1TXQSTA
C1FIFOCONxL, C1FIFOSTAx
RFFIE
RFFIF
RFHIE
RFHIF
RFNIE
RFNIF
TXQEIE
TXQEIF
TXQNIE
TXQNIF
TFEIE
TFEIF
TFHIE
TFHIF
TFNIE
TFNIF
RXOVIE
RXOVIF
TXATIE
TXATIF
C1TEFCONL
C1TEFSTA
TXATIE
TXATIF
TEFOVIE
TEFOVIF
TEFFIE
TEFFIF
TEFHIE
TEFHIF
TEFNEIE
TEFNEIF
1 FIFO
31 FIFOs
1 TXQ
31 FIFOs
31x
1x
31x
RFIFH<15:0> (C1RXIFH)
RFIFL<15:1> (C1RXIFL)
TFIF<0> (C1TXIFL)
C1TXIFH<15:0>
C1TXIFL<15:1>
C1RXOVIFH<15:0>
C1RXOVIFL<15:1>
C1TXATIFH<15:0>
C1TXATIFL<15:1>
C1TXATIFL<0>
31 FIFOs
1 TXQ
31 FIFOs
31x 1x 31x
32x
31x
32x
TXIE (C1INTH)
TXIF (C1INTL)
RXOVIE (C1INTH)
RXOVIF (C1INTL)
TXATIE (C1INTH)
TXATIF (C1INTL)
TEFIE (C1INTH)
TEFIF (C1INTL)
IVMIE (C1INTH)
IVMIF (C1INTL)
WAKIE (C1INTH)
WAKIF (C1INTL)
CERRIE (C1INTH)
CERRIF (C1INTL)
MODIE (C1INTH)
MODIF (C1INTL)
TBCIE (C1INTH)
TBCIF (C1INTL)
SERRIE (C1INTH)
SERRIF (C1INTL)
RXIE (C1INTH)
RXIF (C1INTL)
31x
TX Interrupt
Info Interrupt
OR

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 106 2018 Microchip Technology Inc.
12.1 FIFO Individual Interrupts
C1FIFOCONxL contains the interrupt enable flags and C1FIFOSTAx contains the interrupt flags
for the FIFOs. There is a separate register for each FIFO.
12.1.1 TRANSMIT QUEUE INTERRUPTS
C1TXQCONL contains the interrupt enable flags and C1TXQSTA contains the interrupt flags for
the TXQ.
The TXQ interrupt occurs when there is a change in the status of the TXQ. There are two
interrupt sources:
• TXQ Not Full Interrupt Flag (TXQNIF)
• TXQ Empty Interrupt Flag (TXQEIF)
Both interrupts can be enabled individually. The interrupts cannot be cleared by the application;
they will be cleared when the condition of the FIFO terminates.
Both interrupt sources are OR’d together and reflected in the TFIF0 flag (C1TXIFL<0>).
12.1.2 RECEIVE FIFO INTERRUPTS – RFIF
The receive FIFO interrupts occur when there is a change in the status of the receive FIFO.
There are three interrupt sources:
• Receive FIFO Full Interrupt Flag (RFFIF)
• Receive FIFO Half Full Interrupt Flag (RFHIF)
• Receive FIFO Not Empty Interrupt Flag (RFNIF)
All three interrupts can be enabled individually. The interrupts cannot be cleared by the
application; they will be cleared when the condition of the FIFO terminates.
The three interrupt sources are OR’d together and reflected in the RFIF<31:16> (C1RXIFH<15:0>)
and RFIF<15:1> (C1RXIFL<15:1>) flags.
12.1.3 TRANSMIT FIFO INTERRUPTS – TFIF
The transmit FIFO interrupts occur when there is a change in the status of the transmit FIFO.
There are three interrupt sources:
• Transmit FIFO Not Full Interrupt Flag (TFNIF)
• Transmit FIFO Half Empty Interrupt Flag (TFHIF)
• Transmit FIFO Empty Interrupt Flag (TFEIF)
All three interrupts can be enabled individually. The interrupts cannot be cleared by the
application; they will be cleared when the condition of the FIFO terminates.
The three interrupt sources are OR’d together and reflected in the C1TXIFL<15:1> and
C1TXIFH<15:0> flags.
12.1.4 RECEIVE FIFO OVERRUN INTERRUPT – RXOVIF
When a message is successfully received, but the FIFO is full, the RXOVIF of the individual
FIFO is set. The flag must be cleared by the application.
12.1.5 TRANSMIT FIFO ATTEMPT INTERRUPT – TXATIF
When the retransmission of a message fails due to an error, and all retransmission attempts are
exhausted, the TXATIF flag is set. The flag must be cleared by the application.

2018 Microchip Technology Inc. DS70005340A-page 107
CAN FD Protocol Module
12.1.6 TRANSMIT EVENT FIFO INTERRUPTS – TEFIF
The TEF interrupts occur when there is a change in the status of the TEF. There are four
interrupt sources:
• TEF Full Interrupt Flag (TEFFIF)
• TEF Half Full Interrupt Flag (TEFHIF)
• TEF Not Empty Interrupt Flag (TEFNEIF)
• TEF Overrun Interrupt Flag (TEFOVIF)
The TEF interrupts work similarly to the receive FIFO interrupts. All four interrupts can be
enabled individually.
TEFFIF, TEFHIF and TEFNEIF cannot be cleared by the application; they will be cleared when
the status of the FIFO terminates.
The TEFOVIF must be cleared by the application.
The four interrupt sources are OR’d together and reflected in the TEFIF flag (C1INTL<4>).
12.2 FIFO Combined Interrupts
The following interrupts are individual FIFO interrupts:
• FIFOs/TXQ: RFIFx, TFIFx, RFOVIFx and TFATIFx
They are combined into single Interrupt Status registers:
• C1RXIFH/L, C1TXIFH/L, C1RXOVIFH/L and C1TXATIFH/L.
The bits in the status registers are mapped to the FIFOs as follows: Bit 0 to TXQ, Bit 1 to
FIFO 1, Bit 2 to FIFO 2, up to Bit 31 to FIFO 31. Since Bit 0 corresponds to the TXQ, Bit 0 of
C1RXIFL and C1RXOVIFL is reserved. Hence, by reading one register, the application can
check the status of all FIFOs for a particular interrupt (e.g., any RFIFx pending).
The FIFO interrupts are enabled in C1FIFOCONxL.
TXQ interrupts are enabled in C1TXQCONL.
Clearing of the FIFO interrupts is explained in Section 12.1 “FIFO Individual Interrupts”.
12.3 Main Interrupts
The C1INT register contains all the main interrupts. The following interrupts are a logical ‘OR’ of
all combined FIFO interrupts: RXIF, TXIF, RXOVIF and TXATIF. These flags are read-only and
must be cleared in preceding hierarchies.
The TEFIF is generated in the TEF. This flag is read-only and must be cleared in preceding
hierarchies.
All interrupts in C1INTH/L can be enabled individually.
12.3.1 INVALID MESSAGE INTERRUPT – IVMIF
If a CAN bus error or DLC mismatch is detected during the last message transmitted or
received, the IVMIF bit will be set. The C1BDIAG1H register sets a flag for each error. The flag
must be cleared by the application.
The following CAN bus errors will trigger the interrupt in case an error frame is transmitted:
CRC, stuff bit, form, bit or ACK.
The flag will not be set if the ESI of a received message is set.
12.3.2 WAKE-UP INTERRUPT – WAKIF
This bit is set if bus activity has been detected while the module is in Sleep mode. The flag must
be cleared by the application.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 108 2018 Microchip Technology Inc.
12.3.3 CAN BUS ERROR INTERRUPT – CERRIF
The C1TRECH/L registers will count the errors during transmit and receive according to the
ISO11898-1:2015. The CERRIF flag will be set based on the error counter values. The flag
must be cleared by the application.
CERRIF will be set each time a threshold in the TEC/REC counter is crossed by the following
conditions:
• TEC or REC exceeds the error warning state threshold
• The transmitter or receiver transitions to the error passive state
• The transmitter transitions to the bus off state
• The transmitter or receiver transitions from the error passive to error active state
• The module transitions from the bus off to error active state after the bus off recovery
sequence
When the user clears CERRIF, it will remain clear until a new counter crossing occurs.
12.3.4 CAN MODE CHANGE INTERRUPT – MODIF
When the OPMOD<2:0> bits change, the MODIF flag will be set. The flag must be cleared by
the application.
12.3.5 CAN TIMER INTERRUPT – TBCIF
When the Time Base Counter rolls over, TBCIF will be set. The flag must be cleared by the
application.
12.3.6 SYSTEM ERROR INTERRUPT – SERRIF
• Bus Bandwidth Error:
Bandwidth errors can happen during receive and transmit.
Receive Message Assembly Buffer (RX MAB) overflow occurs when the module is unable
to write a received CAN message to RAM before the next message arrives.
Transmit Message Assembly Buffer (TX MAB) underflow occurs when the module cannot
feed the TX MAB fast enough to provide consistent data to the Bit Stream Processor.
The SERRIF flag will be set and the ICODE<6:0> bits (C1VECL<6:0>) will be set
to 100 0101.
• Handling of RX MAB Overflow Errors:
RX MAB overflows are not acceptable for some applications. To prevent overflows, frame
filtering and data saving starts as early as possible; the latest at the beginning of the CRC
field of the received message. Updating the FIFO status has to wait until the beginning of
the 7th bit of the EOF field, since the received frame is only valid at this point. The complete
message has to be saved and the FIFO has to be updated until the end of the arbitration
field of the next message.
In case of an RX MAB overflow, the new message that caused the overflow will be dis-
carded. The module continues to store the message that is completely received and filtered.
Afterwards, the module will be able to receive new messages on the bus. The application
will be notified using the SERRIF bit.
The SERRIF bit (C1INTL<12>) will be cleared by writing a zero to the bit. This will also clear
the SERRIF condition from the ICODEx bits.
• Handling of TX MAB Underflow Errors:
ISO11898-1:2015 requires MAC data consistency: a transmitted message must contain con-
sistent data. If data errors occur due to ECC errors, or TX MAB underflow, the transmission
will not start. If the transmission is in progress, it will stop and the module will transition to
either Restricted Operation or Listen Only mode, which is selectable using the SERRLOM
bit (C1CONH<2>).

2018 Microchip Technology Inc. DS70005340A-page 109
CAN FD Protocol Module
The module handles these errors by stopping the transmission and transitioning to Restricted
Operation or Listen Only mode. The CxTX pin will be forced high. Additionally, all TXREQs will
be ignored. The application will be notified using SERRIF. The module will continue to receive
messages.
12.4 Interrupt Handling
The CAN FD Protocol Module allows the application to handle interrupts efficiently by:
• Implementing a lookup table using the C1VECH/L registers.
• Using the status registers and deciding which interrupt to service first.
The application can also use a combination of these two methods to handle interrupts.
12.4.1 INTERRUPT LOOKUP TABLE
The ICODEx and FILHITx bits in the C1VECL register enable the application to use a lookup
table to implement the Interrupt Service Routine (ISR).
The following bit fields allow the application to make full use of the three interrupt pins:
• TXCODE<6:0> bits: Reflect which object has a transmit interrupt pending
• RXCODE<6:0> bits: Reflect which object has a receive interrupt pending
A separate lookup table can be implemented for transmit and receive interrupts.
If more than one object has a pending interrupt, the interrupt or FIFO with the highest number
will show up in RXCODEx, TXCODEx and ICODEx. Once the interrupt with the highest priority
is cleared, the next highest priority interrupt will show up in C1VECH/L. RXCODEx, TXCODEx
and ICODEx are implemented with combinatorial logic using the interrupt flags as inputs.
12.4.2 INTERRUPT STATUS REGISTERS
The CAN FD Protocol Module contains 31 FIFOs and a TXQ. It would be complex to use the
ICODEx bits since the interrupt priorities are determined by the module. Therefore, the following
measures are taken to ensure efficient servicing of interrupts:
• C1INTL and C1INTH contain all main interrupt sources. The application can identify the
categories of interrupts that are pending and decide the order in which interrupts are to be
serviced (e.g., RXIF).
• All categories of interrupts for all FIFOs are combined into individual registers: C1RXIFH/L,
C1TXIFH/L, C1RXOVIFH/L and C1TXATIFH/L. The application can identify the RFIFx bits
that are pending by reading only one register. The same is true for TFIFx, RXOVIF and
TXATIF.
• In the register map, the Interrupt Status registers are arranged in a single block: C1VECH/L,
followed by C1INTH/L, C1RXIFH/L, C1TXIFH/L, C1RXOVIFH/L and C1TXATIFH/L. This
arrangement allows all status registers to be read with a single read access.
Note: There are two types of addressing errors and both of them will cause a soft trap error
on a dsPIC33CH device by setting the CAN bit in the INTCON3 register.
The first addressing error occurs when a FIFO is configured with an invalid address.
This error most commonly occurs when the FIFO points to an unimplemented
address.
The second addressing error commonly occurs when the message destination is
illegal; for example, attempting to write a received message to a program Flash,
which is not directly writable.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 110 2018 Microchip Technology Inc.
12.5 Interrupt Flags
Table 12-1 summarizes all interrupt flags and lists how interrupts are cleared.
Table 12-1: Interrupt Flags
Flags Registers Categories
Cleared by
Module
(1)
Cleared by
Application
Read-Only
(2)
Description
RFFIF, RFHIF,
RFNIF
C1FIFOSTAx FIFO X — — RX FIFO
TFNIF, TFHIF,
TFEIF
C1FIFOSTAx FIFO X — — TX FIFO
TXQNIF, TXQEIF C1TXQSTA TXQ X — — Transmit Queue
RXOVIF C1FIFOSTAx FIFO — X — RX Overrun
TXATIF C1FIFOSTAx,
C1TXQSTA
FIFO, TXQ — X — TX Attempt
TEFFIF,
TEFHIF,
TEFNEIF
C1TEFSTA FIFO X — — TEF
TEFOVIF C1TEFSTA FIFO — X — TEF Overrun
RFIF<31:1> C1RXIFH/L Combined — — X All RX FIFOs
TFIF<31:1> C1TXIFH/L Combined — — X All TX FIFOs
RFOVIF<31:1> C1RXOVIFH/L Combined — — X All RX FIFO
Overruns
TFATIF<31:0> C1TXATIFH/L Combined — — X All TX FIFO
Attempts
RXIF C1INTL Main — — X RX
TXIF C1INTL Main — — X TX
RXOVIF C1INTL Main — — X RX Overrun
TXATIF C1INTL Main — — X TX Attempt
TEFIF C1INTL Main — — X TEF
IVMIF C1INTL Main — X — Invalid Message
WAKIF C1INTL Main — X — Wake-up
CERRIF C1INTL Main — X — CAN Bus Error
MODIF C1INTL Main — X — Mode Change
TBCIF C1INTL Main — X — Time Base
Counter
SERRIF C1INTL Main — X — System Error
Note 1: The flags will be cleared when the condition of the FIFO terminates, initiated by the
UINC bit (C1FIFOCONxL<8>.
2: The flags need to be cleared in the preceding hierarchies.

2018 Microchip Technology Inc. DS70005340A-page 111
CAN FD Protocol Module
13.0 ERROR HANDLING
Every CAN controller checks the messages on the bus for the following errors: bit, stuff, CRC,
form and ACK errors. Whenever the controller detects an error, an error frame is transmitted
that deletes the message on the bus. Error frames are always signaled using the Nominal Bit
Rate.
Error detection and Fault confinement are described in the ISO11898-1:2015. C1TRECL con-
tains the error counters, TEC and REC (TERRCNTx, RERRCNTx). C1TRECH contains the
error warning and error state bits. TEC and REC increment and decrement according to
ISO11898-1:2015 specifications.
Figure 13-1 illustrates the different error states of the CAN FD Protocol Module. The module
starts in the error active state. If the TEC or REC exceeds 127, the module transitions to the
error passive state. If the TEC exceeds 255, the module will transition to the bus off state.
The module transmits active error frames when in an error active state. It will transmit passive
error frames while in an error passive state. When the module is in bus off, the CxTX pin is
always driven high and no dominant bits are transmitted.
To avoid the module from transitioning to the error passive state, the module will alert the appli-
cation when the TEC or REC reaches 96, using the CERRIF interrupt flag (see Section 12.3.3
“CAN Bus Error Interrupt – CERRIF”). This allows the application to take action before it
enters the error passive state.
Figure 13-1: Error States
The Bus Diagnostic registers provide additional information about the health of the CAN bus:
• C1BDIAG0L and C1BDIAG0H contain separate error counters for receive/transmit and for
Nominal/Data Bit Rates. The counters work differently than the counters in the C1TRECH/L
registers. They are simply incremented by one on every error. They are never
decremented, but can be cleared by writing ‘0’ to the register.
• C1BDIAG1L keeps track of the kind of error that occurred since the last clearing of the
register. The C1BDIAG1H register also contains the error-free message counter. The flags
and the counter are cleared by writing ‘0’ to the register.
The error-free message counter, together with the error counters and error flags, can be used to
determine the quality of the bus.
128 Occurrences
of the Idle Condition
TEC > 255
TEC > 127 or
REC > 127
TEC < 128 and
REC < 128
POR
Error
Active
Error
Passive
Bus Off

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 112 2018 Microchip Technology Inc.
13.1 Recovery from Bus Off State
If the TEC exceeds 255, the TXBO (C1TRECH<5>) and CERRIF (C1INTL<13>) bits will be set.
The module will go to bus off and start the bus off recovery sequence.
The bus off recovery sequence starts automatically. The module will transition out of the bus off
state only after the detection of 128 Idle conditions (see “ISO11898-1:2015: Bus Off Management”).
The module will set FRESET for all transmit FIFOs when entering the bus off state to ensure that
the module does not try to retransmit indefinitely. The application will be notified by CERRIF and
has the option to queue new messages for transmission.
The module signals the exit from the bus off state with the CERRIF bit and by setting the
TXBOERR bit (C1BDIAG1H<7>). Additionally, C1TREC will be reset.
2018 Microchip Technology Inc. DS70005340A-page 113
CAN FD Protocol Module
14.0 RELATED APPLICATION NOTES
This section lists application notes that are related to this section of the manual. These
application notes may not be written specifically for the dsPIC33/PIC24 device families, but the
concepts are pertinent and could be used with modification and possible limitations. The current
application notes related to the CAN FD Protocol Module include the following:
Title Application Note #
No related application notes at this time. N/A
Note: Please visit the Microchip web site (www.microchip.com) for additional application
notes and code examples for the dsPIC33/PIC24 family of devices.

dsPIC33/PIC24 Family Reference Manual
DS70005340A-page 114 2018 Microchip Technology Inc.
15.0 REVISION HISTORY
Revision A (February 2018)
This is the initial version of this document.

2018 Microchip Technology Inc. DS70005340A-page 115
Information contained in this publication regarding device
applications and the like is provided only for your convenience
and may be superseded by updates. It is your responsibility to
ensure that your application meets with your specifications.
MICROCHIP MAKES NO REPRESENTATIONS OR
WARRANTIES OF ANY KIND WHETHER EXPRESS OR
IMPLIED, WRITTEN OR ORAL, STATUTORY OR
OTHERWISE, RELATED TO THE INFORMATION,
INCLUDING BUT NOT LIMITED TO ITS CONDITION,
QUALITY, PERFORMANCE, MERCHANTABILITY OR
FITNESS FOR PURPOSE. Microchip disclaims all liability
arising from this information and its use. Use of Microchip
devices in life support and/or safety applications is entirely at
the buyer’s risk, and the buyer agrees to defend, indemnify and
hold harmless Microchip from any and all damages, claims,
suits, or expenses resulting from such use. No licenses are
conveyed, implicitly or otherwise, under any Microchip
intellectual property rights unless otherwise stated.
Trademarks
The Microchip name and logo, the Microchip logo, AnyRate, AVR,
AVR logo, AVR Freaks, BeaconThings, BitCloud, CryptoMemory,
CryptoRF, dsPIC, FlashFlex, flexPWR, Heldo, JukeBlox, K
EE
L
OQ
,
K
EE
L
OQ
logo, Kleer, LANCheck, LINK MD, maXStylus,
maXTouch, MediaLB, megaAVR, MOST, MOST logo, MPLAB,
OptoLyzer, PIC, picoPower, PICSTART, PIC32 logo, Prochip
Designer, QTouch, RightTouch, SAM-BA, SpyNIC, SST, SST
Logo, SuperFlash, tinyAVR, UNI/O, and XMEGA are registered
trademarks of Microchip Technology Incorporated in the U.S.A.
and other countries.
ClockWorks, The Embedded Control Solutions Company,
EtherSynch, Hyper Speed Control, HyperLight Load, IntelliMOS,
mTouch, Precision Edge, and Quiet-Wire are registered
trademarks of Microchip Technology Incorporated in the U.S.A.
Adjacent Key Suppression, AKS, Analog-for-the-Digital Age, Any
Capacitor, AnyIn, AnyOut, BodyCom, chipKIT, chipKIT logo,
CodeGuard, CryptoAuthentication, CryptoCompanion,
CryptoController, dsPICDEM, dsPICDEM.net, Dynamic Average
Matching, DAM, ECAN, EtherGREEN, In-Circuit Serial
Programming, ICSP, Inter-Chip Connectivity, JitterBlocker,
KleerNet, KleerNet logo, Mindi, MiWi, motorBench, MPASM, MPF,
MPLAB Certified logo, MPLIB, MPLINK, MultiTRAK, NetDetach,
Omniscient Code Generation, PICDEM, PICDEM.net, PICkit,
PICtail, PureSilicon, QMatrix, RightTouch logo, REAL ICE, Ripple
Blocker, SAM-ICE, Serial Quad I/O, SMART-I.S., SQI,
SuperSwitcher, SuperSwitcher II, Total Endurance, TSHARC,
USBCheck, VariSense, ViewSpan, WiperLock, Wireless DNA, and
ZENA are trademarks of Microchip Technology Incorporated in the
U.S.A. and other countries.
SQTP is a service mark of Microchip Technology Incorporated in
the U.S.A.
Silicon Storage Technology is a registered trademark of Microchip
Technology Inc. in other countries.
GestIC is a registered trademark of Microchip Technology
Germany II GmbH & Co. KG, a subsidiary of Microchip Technology
Inc., in other countries.
All other trademarks mentioned herein are property of their
respective companies.
© 2018, Microchip Technology Incorporated, All Rights Reserved.
ISBN: 978-1-5224-2643-1
Note the following details of the code protection feature on Microchip devices:
• Microchip products meet the specification contained in their particular Microchip Data Sheet.
• Microchip believes that its family of products is one of the most secure families of its kind on the market today, when used in the
intended manner and under normal conditions.
• There are dishonest and possibly illegal methods used to breach the code protection feature. All of these methods, to our
knowledge, require using the Microchip products in a manner outside the operating specifications contained in Microchip’s Data
Sheets. Most likely, the person doing so is engaged in theft of intellectual property.
• Microchip is willing to work with the customer who is concerned about the integrity of their code.
• Neither Microchip nor any other semiconductor manufacturer can guarantee the security of their code. Code protection does not
mean that we are guaranteeing the product as “unbreakable.”
Code protection is constantly evolving. We at Microchip are committed to continuously improving the code protection features of our
products. Attempts to break Microchip’s code protection feature may be a violation of the Digital Millennium Copyright Act. If such acts
allow unauthorized access to your software or other copyrighted work, you may have a right to sue for relief under that Act.
Microchip received ISO/TS-16949:2009 certification for its worldwide
headquarters, design and wafer fabrication facilities in Chandler and
Tempe, Arizona; Gresham, Oregon and design centers in California
and India. The Company’s quality system processes and procedures
are for its PIC
®
MCUs and dsPIC
®
DSCs, KEELOQ
®
code hopping
devices, Serial EEPROMs, microperipherals, nonvolatile memory and
analog products. In addition, Microchip’s quality system for the design
and manufacture of development systems is ISO 9001:2000 certified.
QUALITY MANAGEMENT S
YSTEM
CERTIFIED BY DNV
== ISO/TS 16949 ==

DS70005340A-page 116 2018 Microchip Technology Inc.
AMERICAS
Corporate Office
2355 West Chandler Blvd.
Chandler, AZ 85224-6199
Tel: 480-792-7200
Fax: 480-792-7277
Technical Support:
http://www.microchip.com/
support
Web Address:
www.microchip.com
Atlanta
Duluth, GA
Tel: 678-957-9614
Fax: 678-957-1455
Austin, TX
Tel: 512-257-3370
Boston
Westborough, MA
Tel: 774-760-0087
Fax: 774-760-0088
Chicago
Itasca, IL
Tel: 630-285-0071
Fax: 630-285-0075
Dallas
Addison, TX
Tel: 972-818-7423
Fax: 972-818-2924
Detroit
Novi, MI
Tel: 248-848-4000
Houston, TX
Tel: 281-894-5983
Indianapolis
Noblesville, IN
Tel: 317-773-8323
Fax: 317-773-5453
Tel: 317-536-2380
Los Angeles
Mission Viejo, CA
Tel: 949-462-9523
Fax: 949-462-9608
Tel: 951-273-7800
Raleigh, NC
Tel: 919-844-7510
New York, NY
Tel: 631-435-6000
San Jose, CA
Tel: 408-735-9110
Tel: 408-436-4270
Canada - Toronto
Tel: 905-695-1980
Fax: 905-695-2078
ASIA/PACIFIC
Australia - Sydney
Tel: 61-2-9868-6733
China - Beijing
Tel: 86-10-8569-7000
China - Chengdu
Tel: 86-28-8665-5511
China - Chongqing
Tel: 86-23-8980-9588
China - Dongguan
Tel: 86-769-8702-9880
China - Guangzhou
Tel: 86-20-8755-8029
China - Hangzhou
Tel: 86-571-8792-8115
China - Hong Kong SAR
Tel: 852-2943-5100
China - Nanjing
Tel: 86-25-8473-2460
China - Qingdao
Tel: 86-532-8502-7355
China - Shanghai
Tel: 86-21-3326-8000
China - Shenyang
Tel: 86-24-2334-2829
China - Shenzhen
Tel: 86-755-8864-2200
China - Suzhou
Tel: 86-186-6233-1526
China - Wuhan
Tel: 86-27-5980-5300
China - Xian
Tel: 86-29-8833-7252
China - Xiamen
Tel: 86-592-2388138
China - Zhuhai
Tel: 86-756-3210040
ASIA/PACIFIC
India - Bangalore
Tel: 91-80-3090-4444
India - New Delhi
Tel: 91-11-4160-8631
India - Pune
Tel: 91-20-4121-0141
Japan - Osaka
Tel: 81-6-6152-7160
Japan - Tokyo
Tel: 81-3-6880- 3770
Korea - Daegu
Tel: 82-53-744-4301
Korea - Seoul
Tel: 82-2-554-7200
Malaysia - Kuala Lumpur
Tel: 60-3-7651-7906
Malaysia - Penang
Tel: 60-4-227-8870
Philippines - Manila
Tel: 63-2-634-9065
Singapore
Tel: 65-6334-8870
Taiwan - Hsin Chu
Tel: 886-3-577-8366
Taiwan - Kaohsiung
Tel: 886-7-213-7830
Taiwan - Taipei
Tel: 886-2-2508-8600
Thailand - Bangkok
Tel: 66-2-694-1351
Vietnam - Ho Chi Minh
Tel: 84-28-5448-2100
EUROPE
Austria - Wels
Tel: 43-7242-2244-39
Fax: 43-7242-2244-393
Denmark - Copenhagen
Tel: 45-4450-2828
Fax: 45-4485-2829
Finland - Espoo
Tel: 358-9-4520-820
France - Paris
Tel: 33-1-69-53-63-20
Fax: 33-1-69-30-90-79
Germany - Garching
Tel: 49-8931-9700
Germany - Haan
Tel: 49-2129-3766400
Germany - Heilbronn
Tel: 49-7131-67-3636
Germany - Karlsruhe
Tel: 49-721-625370
Germany - Munich
Tel: 49-89-627-144-0
Fax: 49-89-627-144-44
Germany - Rosenheim
Tel: 49-8031-354-560
Israel - Ra’anana
Tel: 972-9-744-7705
Italy - Milan
Tel: 39-0331-742611
Fax: 39-0331-466781
Italy - Padova
Tel: 39-049-7625286
Netherlands - Drunen
Tel: 31-416-690399
Fax: 31-416-690340
Norway - Trondheim
Tel: 47-7289-7561
Poland - Warsaw
Tel: 48-22-3325737
Romania - Bucharest
Tel: 40-21-407-87-50
Spain - Madrid
Tel: 34-91-708-08-90
Fax: 34-91-708-08-91
Sweden - Gothenberg
Tel: 46-31-704-60-40
Sweden - Stockholm
Tel: 46-8-5090-4654
UK - Wokingham
Tel: 44-118-921-5800
Fax: 44-118-921-5820
Worldwide Sales and Service
10/25/17
