A peer pressure experiment: Recreation of the Asch conformity
experiment with robots.
J
¨
urgen Brandstetter
1
, P
´
eter R
´
acz
2
, Clay Beckner
2
, Eduardo B. Sandoval
1
, Jennifer Hay
2
, Christoph Bartneck
1
Abstract— The question put forward in this paper is whether
robots can create conformity by means of group pressure. We
recreate and expand on a classic social psychology experiment
by Solomon Asch, so as to explore three main dimensions. First,
we wanted to know whether robots can prompt conformity in
human subjects, and whether there is a significant difference
between the degree to which individuals conform to a group
of robots as opposed to a group of humans. Secondly we ask
whether group pressure (from human or robot peers) can exert
influence in verbal judgments, analogously to the influence on
visual judgments that is known from previous research [3], [2].
Thirdly, we investigate whether the level of conformity differs
between an ambiguous situation and a non-ambiguous situation.
Our results show that in both visual and verbal tasks,
participants exhibit conformity with human peers, but not
with robot peers. The social influence of robot peers is not a
significant predictor of verbal or visual judgments in our tasks.
Furthermore, the level of conformity is significantly higher in
an ambiguous (unclear) situation.
I. INTRODUCTION
When we look at the current development of human-
like social robots, it is possible to predict a future where
robots help out in the office, teach children in the class-
room, become companions, work in advertising, or help in
our households [5], [14], [20]. During the last few years,
there has been an observable trend towards service robots
outflanking industrial robots in production volume. Whereas
all sold industrial robots total 2.3 million units, more than
2.5 million units of service robots were sold in 2011 alone,
with an estimated 16 million further units to be sold between
2012 and 2015 [24]. The importance of robots is not only
recognized by the science community and the industry,
but also by governments. For example, the New Zealand
government has put the development of robots on their main
future agenda.
With this increased presence of robots in domestic life, the
question remains as to how these robots will be regarded by
humans—as mindless machines, as subservients, or as peers?
Previous work demonstrates that humans treat computers
socially, for instance, by tempering unpleasant feedback to a
computer, apparently so as to be more polite [19], [9]. Such
findings raise the question of whether it is possible for robots
to prompt human conformity.
1
Human Interface Technology Lab, University of Canterbury, P.O. Box
4800, Christchurch, 8140, New Zealand
2
New Zealand Institute of Language, Brain and Behaviour, University of
Canterbury, P.O. Box 4800, Christchurch, 8140, New Zealand
Please direct correspondence to J
¨
urgen Brandstetter at
P
´
eter R
´
To investigate the persuasive power of robots, we ex-
pand on two landmark psychology experiments. The first
experiment was conducted by Muzafer Sherif, who studied a
conformity effect in an ambiguous situation. The experiment
builds on the autokinetic effect, a phenomenon in which a
person perceives a sudden movement of a light point when
no reference is given. Sherif created this effect by sitting
participants in a dark room with one small light point visible.
The participants had to look at this point, and had to say
how much the light point moved. However, the light never
actually moved, but the autokinetic effect created an illusory
sudden movement. This movement is perceived differently
by different people. After he did the experiment with one
person, Sherif set two or three people in the same room
and asked them to say out loud how much the point moved.
Astonishingly, after three rounds all the participants said the
same number, even though everyone perceived a different
movement. This effect is called informational conformity or
social proof and describes the effect in which people in an
uncertain situation look at their neighbors to see what is
probably the right answer and conform with them. [7], [21],
[15].
A second experiment is reported by Solomon Asch in his
influential paper “Effects of group pressure upon the mod-
ification and distortion of judgements”. Asch builds on the
findings of Sherif to find out whether humans also conform in
non-ambiguous situations. His experiment simulated a simple
visual line test. The participant saw three lines of different
heights, labelled A, B, C on the left side of a board, and one
reference line on the right side labelled with “?” (see Figure
1). The task was to say which line matched the reference line.
When the participants were alone in a room to perform the
test they almost always gave the correct answer. In a second
round Asch placed the participants in the same room with
other participants who were all actors and who all gave the
wrong answer. Even though the real participant – presumably
– knew the correct answer, in 32% of all tasks the participants
went along with the group if the group size was bigger than
four. In this case, Asch provided evidence that conformity
is not only influential in ambiguous situations but also in
non-ambiguous ones [2], [3], [4].
In the current study, we recreate the Asch experiment and
use aspects of the Sherif experiment as a model for further
research. We investigate a visual judgment task along the
lines of Asch [2], [3], [4], and extend the methodology
to a verbal production task. Verbal tasks may provide an
especially fruitful domain for conformity studies, because
language is inherently social, and speakers influence one
2014 IEEE/RSJ International Conference on
Intelligent Robots and Systems (IROS 2014)
September 14-18, 2014, Chicago, IL, USA
978-1-4799-6934-0/14/$31.00 ©2014 IEEE 1335

Fig. 1: An example of the lines task, where the participants
have to identify the corresponding line. Based on Solomon
Asch’s experiment.[2]
Fig. 2: An example of a word set presented in the word task.
The four confederates each produce the past tense form of
the first four verbs. Participants then have to provide the
correct past tense form of the fifth
another’s linguistic behaviors on an ongoing basis. The
perceived social characteristics of a speaker seem to play
a role in speech processing, and the social status of speakers
affects processes of language change[12], [13]. Moreover, it
is known that speakers tend to copy one another in natural
settings; individuals align their actions and representations,
interactively and subconsciously [10]. Speakers have many
choices available when they speak; for instance they may
often choose from different pronunciations of the same
word. In a conversational context, one speaker’s choice of
a particular linguistic variant typically increases the likeli-
hood that other speakers will choose the same variant. In
most cases, speakers accommodate to each other, and their
linguistic styles “converge”, as is found by observing many
linguistic domains including speech rate [22], word choices
[6], and choices of grammatical constructions [23]. Speaker
convergence is subject to social variables; speakers tend to
accommodate to one another unless they want to establish
social distance from their interlocutor(s) [1], [17], [18].
In the current experiment, we explore a form of linguistic
convergence between speakers with respect to morphological
variation, specifically involving the English past tense. In
some cases speakers may choose between various past tense
patterns, as in “dived” or “dove” for the past tense of “dive”,
or “slayed” or “slew” as the past tense of “slay”. Such
morphological pairs are known as morphological “doublets”;
individual speakers may alternate between different choices
in different circumstances [11], and some competing mor-
phological items have co-existed side-by-side for centuries
[8]. For instance, the Oxford English Dictionary indicates
that the past-tense forms “leaped” and “leapt” have coexisted
in English since at least the 1500s, as have “dreamed” and
“dreamt”. Since no single past tense form is universally
preferred, morphological doublets offer a verbal analogue to
ambiguous visual judgements. The proposal of the current
study is that the choice of one verb variant over another
is a behavior that may be influenced by other speakers.
That is, speakers who influence one another socially should
be expected to converge on the same past tense form (or
the same past tense verb pattern). Building on the above
experiments and our interests in Human Robot Interaction
and verbal communication, we developed an experiment
which includes the following conditions: ambiguous and
non-ambiguous line conditions, and ambiguous and non-
ambiguous verbal conditions. We ran these conditions with
four confederate robots (for one group of participants) or
four confederate human actors (for the other). Data in the
peer conditions is compared against matched baseline data,
gathered from participants in isolation. The first question we
wanted to answer was whether participants conform more (or
less) to a robot group than to a human group. The second
question is whether conformity to verbal judgments can be
observed in a peer-pressure experiment, comparable to the
classic conformity studies by Asch. In the last question we
wanted to understand whether participants conform more to
the peer group in an ambiguous task than in a non-ambiguous
task.
For clarity, we summarize our questions here again:
Q1: Do participants conform more to the human group than
the robot group?
Q2: Do participants conform to a group’s verbal judgments
in addition to visual judgments?
Q3: Do participants conform more to the the group in an
ambiguous task than in an non-ambiguous one?
II. METHODS
We performed a 2x2x2 mixed-factor experiment. The
within-subject variables were the modality of the stimulus
(lines vs. words), the ambiguity of the stimulus (ambiguous
vs. non-ambiguous), and the ordering of the stimuli (lines
first vs. words first). The across-subject variable was the
setting: a group of human peers, a group of robot peers,
or alone (the baseline). The number of times the participants
conformed to their peers was the dependent variable. In the
baseline setting, an error in the visual task was the dependent
variable, and in the verbal task the selection of the regular
(-ed-final) past tense form was the dependent variable. Such
responses match the group behaviors in the peer conditions,
as described below, and thus their occurrence in isolation
provides us with information about baseline behavior.
A. Design
We aimed to re-create the Asch and Sherif experiments
introduced above, expanding the visual decision task with
a verbal task and the group of human confederates with a
group of robots.
1336

The line projection consisted of three horizontal parallel
lines labelled A, B, C on the left side of the projection and
one line labelled with ? on the right side. An example can
be seen in Figure 1. The line on the right, marked with
a ? matches one of the lines on the left. The task for the
participant was to say which line, A, B, or C, matched the
line labelled ?, following the model of Asch’s experiment.
The word projection consisted of groups of five words.
The task was to say the word on the projection and its past
tense form, for example like and liked. Each participant had
to say the word corresponding to their position. This means
participant one would say the first word and its past tense,
participant two would say the second word and its past tense,
and so on. An example word set is given in Figure 2.
Each experiment block (involving either lines or words)
was divided into three parts: a warmup (3 subject re-
sponses), an ambiguous-item set (15 subject responses), and
a nonambiguous-item set (15 subject responses). Each ex-
periment block thus consisted of 33 trials, although warmup
items are not analyzed, leaving 30 responses of interest in
each block, per subject.
In the warmup part, consisting of three unambiguous
tasks, the peer group would say the correct answer—thus
providing the correct visual judgment in the lines task, or
providing the normative past tense in the verbal task. In
this case we wanted to give the participants the feeling that
the robots/actors understood the question, and could provide
correct responses.
In the second and third parts of each experiment block, the
experiment confederates (robots or human actors) gave con-
sistent answers, with the intention of swaying participants’
responses away from their default choices. In the visual
task, the confederate actors/robots would always choose the
incorrect line response. In the verbal task, the confederates
always provided the regular past tense form, that is, a form
which ends in -ed.
In the verbal task, ’ambiguous’ items are stimulus verbs
for which variation exists in English usage, and the target
words can have a regular or irregular past tense form, for
example, dive — dived, or dive — dove. Non-ambigous
verbal stimuli are items which have only an irregular past
tense form, for example, run—ran. Note that this means that
in the peer-group conditions, the robots/actors all provided
verb forms which are not normatively in use, that is, over-
regularized forms such as runned as the past tense of run.
Additional details are provided in the ’Baseline’ sec-
tion below regarding about the designation of ambigu-
ous/nonambiguous items in the visual task.
We counter-balanced the order of the line and word
experiment blocks. We used pre-recorded introductions in
all conditions.
B. Apparatus
The setting consisted of a projector, a high quality wireless
microphone, a table with five chairs, four customized Alde-
baran NAO robots or four confederate actors, and a laptop to
control the recordings and experiment. The projecting area
Fig. 3: Plan of the physical setting of the test chamber.
had a dimension of 243x177cm, although the maximum line
length was 118cm. The table was exactly parallel to the
projecting area at a distance of 200cm. The dimensions of
the table were 80x250cm (see Figure 3).
To make our NAO robots more individualistic, we gave
every robot different outfits and voices. We did this in-
dividualization process on the assumption that if robots
were distinctive, participants would more easily see them
as individuals rather than as copies of each other. Since
we wanted to make sure that the robots’ appearance rather
than their voices constitutes the only difference between the
actors and the robots, we used recordings of the actors for
the robot voices. We also made sure that each robot (in the
robot condition) sat in the position corresponding to the actor
(in the human condition) whose voice it shared.
C. Procedure
So as to make the human and robot conditions as consis-
tent as possible, the start of the experiment was designed
so as to discourage spontaneous interactions between the
participant and the confederates. In both conditions, the
participant signed consent forms in a room separate from
the experiment room. The participant was then informed
that the other participants were already in the experiment
room and the study was ready to begin. When the participant
entered the second room, all of the confederates greeted him
or her (with a simple ’Hello’, ’Hi there,’ etc.) In the robot
condition, the robot confederates turned their heads toward
the participant when making the greeting, to give a sense
that the robots were aware of the participant’s presence. The
research assistant told the participant to find an empty chair;
since the confederates were already seated, the participant
had no option but to take the last chair in the row (See Fig. 3).
After the participant sat down, the experiment immediately
started.
D. Baseline
We ran two baseline studies to provide reference points
for judgments in the visual and verbal tasks, in the absence
of any peer pressure.
The baseline setting for the visual task consisted of 107
line configurations. The setup of the room was exactly the
same as in the group experiment, the only difference being
that the participants did not say out loud which line best
1337
matched; they used the buttons 1,2,3 on the keyboard. We
assume there is no difference between saying the answer
out loud or pressing a button when no one is in the room
other than the participant. Out of these 107 settings, we
picked exactly 30 for our group experiment. The corpus
of 30 lines was divided into two parts. The first part (15
settings) contained all the settings where people made most
of the mistakes. These lines were ambiguous and not easy
to distinguish. The second part of the lines contained a set
of lines where the two closest lines had no difference bigger
than 30% and people made only one or zero mistakes. We
chose this setting because Asch used a similar setting to
prove his hypothesis [2]. We used baseline responses to these
30 targets as a comparison to the group settings.
The baseline setting for the verbal task was the same as the
group setting, except that the participant had to produce past
tenses for all the forms on the screen. All items that were
presented in the peer conditions (to confederates as well as
participants) were included in the baseline, to control for pos-
sible priming effects. However, for purposes of quantitative
comparison between baseline and peer conditions, we only
analyze the 30 verbs for which participants in the peer groups
gave responses. We used consistent coding for the baseline
and the group settings, labeling only regularized responses
as ‘conforming’.
Unlike the group settings, the baseline settings for the
lines and the words were run with two different sets of
participants.
E. Participants
We had 78 total participants; 23 participated in the group
of human confederates, 19 in the group of robots, 18 in the
lines baseline, and 18 in the verbal baseline.
All participants were college students at the University of
Canterbury, and all were native speakers of New Zealand
English. It was important to use speakers from one dialect
region only, as there may be regional variation in preferences
for past tense forms.
No participants reported any previous familiarity with the
Asch experiment during debriefing. All participants were
paid $10 for their participation. The experiment lasted about
20-30 minutes.
III. RESULTS
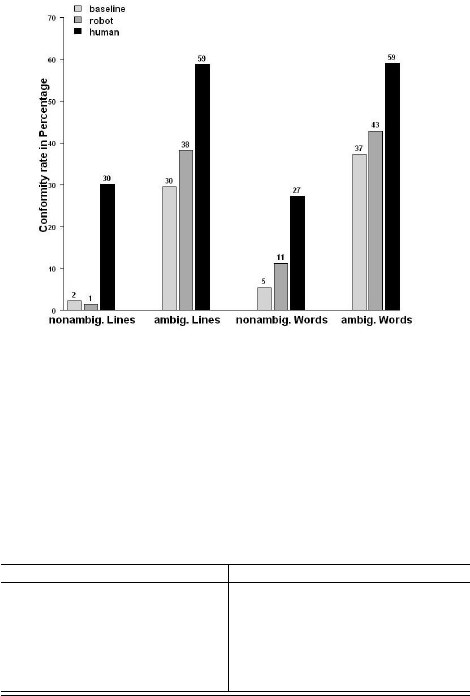
Conformity rates for all conditions are summarized in
Figure 4.
Inspection of this figure reveals a few interesting find-
ings, starting with the baseline regularization of verbs —
’conformity’ in the verbal task when there are no peers
to conform to. Note that among non-ambiguous verbs, 5%
of baseline participants’ responses were in fact regularized.
Such responses represent spontaneous over-regularizations
of verbs which are not expected to deviate from their
irregular status: find—finded, go—goed, know–knowed. Thus,
the regularizations in the baseline verbal task are markedly
more common than in written corpus data, based on searches
of large online print corpora such as the Google Books
Fig. 4: Percentage conformity for all conditions. The ’con-
formity’ in the baseline conditions represents the behavior
of interest (error in the lines task, and regularization in
the verbal task) by isolated subjects, and is thus used as
a reference point for matched items in the robot and human
peer conditions.
conform ∼ group x ambiguous + (1 + ambiguous | subject) + (1 + group
| item)
coef st error z sig
Intercept (baseline) -5.46 0.58 -9.396 ***
group=humans
3.91 0.74 5.267 ***
group=robots
0.55 0.83 0.668 n.s.
ambiguous=T
4.57 0.54 8.403 ***
group=humans x ambiguous=T
-2.51 0.65 -3.889 ***
group=robots x ambiguous=T
-0.18 0.73 -0.248 n.s.
TABLE I: Mixed Effects Model Summary
corpus [16]. This verifies that for purposes of quantitative
comparison, a laboratory baseline study was essential for
interpreting our peer-group results. Production of a sequence
of English past tense forms is an admittedly artificial task,
whether performed in the presence of peers or in isolation,
and speakers may also prime themselves to regularize verbs.
In all conditions, there is a clear and strong effect of
conformity induced by the human peer group. In three of
the four conditions, the robots appear to elicit slightly higher
rates of the conforming judgements than the baseline data,
although the rates are markedly lower than for the humans.
However, in statistical analyses, we do not find evidence
of significant effects of peer influence by robots. A binomial
mixed-effects model was stepwise fit on the data using max-
imal random effect structure. Non-significant effects were
dropped from the model. The model summary is presented
in Table I. For purposes of economy, we only present the
overall model here, which encompasses conformity in both
visual and verbal tasks as the dependent variable. However,
separate models fit independently to the lines and verbs data-
sets also show the same pattern of main effects for peer group
(human or robot) and ambiguity.
The mean per-subject conformity rates for the relevant
across-subject and within-subject settings can be seen in
1338

Figure 5. The degree of conforming responses is significantly
higher for humans than for robots and baseline. Robots
and baseline are not significantly different. This is true for
both the ambiguous and the non-ambiguous settings. The
degree of conforming responses are significantly higher for
the ambiguous setting than for the non-ambiguous setting.
This difference is significantly larger for the human group.
Whether lines come first is not significant. Neither is task
type (lines or words).
●
●●
●
●
●
●
●
●●
●
●
0.0 0.2 0.4 0.6 0.8 1.0
mean rate of conformity
basel.
robots
humans
basel.
robots
humans
non−ambiguous ambiguous
***
***
***
Fig. 5: Subject means for group setting and ambiguity: both
line and word tasks
IV. CONCLUSIONS/DISCUSSION
In this study, our main goal was to find out if robots could
create conformity and if so, how much difference there is
between human peers and robot peers. The study uses the
idea from Sherif, who studied conformity in ambiguous situ-
ations and Asch, who studied conformity in non-ambiguous
situations.
In our first question (Q1) we wanted to know if robot peers
elicit the same conformity as human peers. The analyses
point to a clear null result with respect to peer influence from
robots. When surrounded by robot peers, individuals’ behav-
ior shows some trend toward being influenced in the antici-
pated direction, but this behavior is not significantly different
from the baseline behavior in isolation from peers. Subjects’
behavior alongside robot peers patterns more closely with
the baseline condition than it does with the human-peer
condition.
Of course, null results are always more difficult to interpret
than positive results. One might call into question various
features of our setup: it is always possible significant results
could arise if the sample size were larger, if the robots looked
or acted more human-like, or if the experimental instructions
were different. Additional investigation in these areas would
certainly be appropriate. We should reiterate, however, that
significant results are evident across the board in our study
when the peers are human confederates. Moreover, our
analyses demonstrate that participants’ behavior among robot
peers is significantly different from behavior among human
peers. Individuals clearly interpret robot peers differently
from human peers.
In our second question (Q2) we wanted to know if
participants conform to a group in verbal tasks as well
as in visual tasks. Our data indicates that individuals are
susceptible to social pressure in choosing past tense forms
— again, when the peers are humans, although not when they
are robots. This result supplements a wide range of findings
that speakers interactively align during dialogues, adding
morphological convergence to the inventory of different
linguistic levels for which convergence has been observed.
In our third question (Q3) we wanted to know if there
is more conformity in an ambiguous condition versus a
non-ambiguous situation. The ambiguous situation is often
referred to as social proof [7]. Social proof means that when
people are in an uncertain situation, they tend to look around
to see what their peers do. Conformity is clearly higher in
ambiguous cases, as verified by the regression model.
A. Future Work
There are many aspects of this work that warrant further
investigation. We are particularly interested in conducting
further work into understanding individual variation across
participants, and the types of peer pressure that different
individuals may be vulnerable to. We also intend to attempt
a conformity task which is closer to “natural” interaction, in
which participants are not just giving responses in isolation.
ACKNOWLEDGMENTS
This project was made possible through the support of a
Sub-award under a grant to Northwestern University from the
John Templeton Foundation (Award ID 36617). The opinions
expressed in this publication are those of the author(s) and
do not necessarily reflect the views of the John Templeton
Foundation. Hay and Beckner were also supported by a
Rutherford Discovery Fellowship awarded to Hay.
This project was approved by the University Canterbury
Ethics Committee: HEC APPLICATION 2013/111 and the
Northwestern University Ethics Committee: STU00085449.
A special thanks goes to the four actors; Timothy Pomroy,
Natalie Eustace, Julian Melchert, Morgana Mountfort-Davies
and to Latifah Almanea for recruiting.
REFERENCES
[1] C. Abrego-Collier, J. Grove, M. Sonderegger, and A. C. L. Yu. Effects
of speaker evaluation on phonetic convergence. In Proc. Int. Congress
of the Phonetic Sciences, Hong Kong, pages 192–195, 2011.
[2] S. E. Asch. Effects of group pressure upon the modification and
distortion of judgments. Groups, Leadership, and Men., pages 222–
236, 1951.
[3] S. E. Asch. Opinions and social pressure. Scientific American, pages
31–35, 1955.
[4] S. E. Asch. Studies of independence and conformity: I. A minority
of one against a unanimous majority. Psychological Monographs:
General and Applied, 70(9):1–70, 1956.
[5] C. L. Breazeal. Designing sociable robots. MIT press, 2004.
1339
[6] S. E. Brennan and H. H. Clark. Conceptual pacts and lexical choice in
conversation. Journal of Experimental Psychology: Learning, Memory,
and Cognition, 22(6):1482, 1996.
[7] R. B. Cialdini. Influence : science and practice. HarperCollins, 2009.
[8] C. Fehringer. How stable are morphological doublets? A case study
of schwa/Ø variants in Dutch and German. Journal of Germanic
linguistics, 16(4):285–329, 2004.
[9] B. J. Fogg. Persuasive technology. Ubiquity, 2002(December):2, Dec.
2002.
[10] S. Garrod and M. J. Pickering. Joint action, interactive alignment, and
dialog. Topics in Cognitive Science, 1(2):292–304, 2009.
[11] L. R. Haber. Leaped and Leapt: a theoretical account of linguistic
variation. Foundations of Language, 14(2):211–238, 1976.
[12] J. Hay, P. Warren, and K. Drager. Factors influencing speech per-
ception in the context of a merger-in-progress. Journal of Phonetics,
34(4):458–484, Oct. 2006.
[13] D. J. Hruschka, M. H. Christiansen, R. A. Blythe, W. Croft, P. Heg-
garty, S. S. Mufwene, J. B. Pierrehumbert, and S. Poplack. Building
social cognitive models of language change. Trends in Cognitive
Sciences, 13(11):464–9, Nov. 2009.
[14] T. Kanda, T. Hirano, D. Eaton, and H. Ishiguro. Interactive robots
as social partners and peer tutors for children: A field trial. Human-
computer interaction, 19(1):61–84, 2004.
[15] S. A. McLeod. What is Conformity? - Simply Psychology, 2007.
[16] J.-B. Michel, Y. K. Shen, A. P. Aiden, A. Veres, M. K. Gray,
J. P. Pickett, D. Hoiberg, D. Clancy, P. Norvig, J. Orwant, et al.
Quantitative analysis of culture using millions of digitized books.
Science, 331(6014):176–182, 2011.
[17] M. Natale. Convergence of mean vocal intensity in dyadic communi-
cation as a function of social desirability. Journal of Personality and
Social Psychology, 32(5):790, 1975.
[18] M. Natale. Social desirability as related to convergence of temporal
speech patterns. Perceptual and Motor Skills, 40(3):827–830, 1975.
[19] B. Reeves and C. Nass. The Media Equation: How People Treat
Computers, Television, and New Media Like Real People and Places
(Center for the Study of Language and Information Publication
Lecture Notes). Center for the Study of Language and Inf, 2003.
[20] G. Shaw-Garlock. Looking forward to sociable robots. International
Journal of Social Robotics, 1(3):249–260, 2009.
[21] M. Sherif. A study of some social factors in perception. Archives of
Psychology (Columbia University), 1935.
[22] J. Webb. Studies in dyadic communication: Proceedings of a research
conference on the interview. Pergamon, pages 115–133, 1970.
[23] E. J. Weiner and W. Labov. Constraints on the agentless passive.
Journal of linguistics, 19(1):29–58, 1983.
[24] Worldrobotics.org. World Robotics - Industrial Robots 2012 Executive
Summary. Technical report, 2012.
1340
