Communication Efficiency in Multi-Agent Systems
Mary Berna-Koes
Robotics Institute
Carnegie Mellon University
Illah Nourbakhsh
Robotics Institute
Carnegie Mellon University
Katia Sycara
Robotics Institute
Carnegie Mellon University
Abstract— Despite the growing number of multi-agent software
systems, relatively few physical systems have adopted multi-agent
systems technology. Agents that interact with a dynamic physical
environment have requirements not shared by virtual agents,
including the need to transfer information about the world and
their interaction with it. The agent communication languages
proven successful in software based multi-agent systems incur
overheads that make them impractical or infeasible for the
transfer of low level data. Instead, real world systems typically
employ application specific protocols to transfer video, audio,
sensory, or telemetry data. These protocols lack the transparency
and portability of formal agent communication languages and
consequently are limited in their scalability. We propose aug-
menting the capabilities of current multi-agent systems to provide
for the efficient transfer of low level information, by allowing
backchannels of communication between agents with flexible pro-
tocols in a carefully principled way. We show that this extension
can yield significant performance increases in communication
efficiency and discuss the benefits of incorporating backchannels
into a search a rescue robot system.
I. INTRODUCTION
Agents in a multi-agent system (MAS) must be able to in-
teract and communicate with each other. This usually requires
a common language, an Agent Communication Language, or
ACL. Much work has been done in developing ACLs that
are declarative, syntactically simple, and readable by people.
KQML [1] and FIPA-ACL [2] are two of the most widely used
ACLs in multi-agent systems. These languages have been very
successful in facilitating the communication and coordination
of software agents in a variety of domains including organi-
zational decision making [3], [4]; financial management [5];
and even aircraft maintenance [6]. This approach to interagent
communication, while well suited to communication related
to negotiation or the transfer of high level information, has
significant overhead which frequently proves a drawback in
systems that require the transfer of low level data or systems
with stringent time and bandwidth limits. Real robot systems
typically fall into both of these categories. They may require
the transfer of telemetry, video, audio, and sensory data at high
frequencies in real time over relatively slow wireless networks
or RF modems.
The data transferred by real robot systems tends either to
be relatively small messages, such as telemetry commands, or
large multimedia files, such as streaming video. The overhead
due to the ACL is the most significant for small messages.
Multimedia files are also ill-suited for transfer via ACLs as
the intermediary representation of the files is not compatible
with a textual representation. Furthermore, most ACLs require
ASCII text messages which results in an inflation of the
message size plus additional processing. Consequently, most
physical robot teams do not use the agent communication
languages developed by the multi-agent systems community.
Instead, they typically use an ad hoc solution, defining their
own protocols specific to their system. This approach lacks
the semantic power and transparency afforded by a language
like KQML and does not allow robots from various teams to
communicate.
The robot community would benefit from the adoption of a
formal ACL inside the framework of a MAS, provided that the
efficiency of the current approach of hard coding various pro-
tocols were not significantly decreased. This adoption would
enable different robot systems to communicate and cooperate,
allow robots to negotiate the flow of information, and provide
increased transparency. Likewise, the MAS community could
benefit from a more efficient method of transferring low level
data, such as media files, particularly as web cameras become
more ubiquitous. Thus we have the apparently opposing goals
of improving efficiency for the transfer of media files and small
messages at high frequencies and preserving the portability,
readability, and declarative nature of an agent communication
language like KQML.
We propose a two tiered communication strategy, aug-
menting the current multi-agent system architecture. This
solution realizes both these goals by uniting the strengths of
ACLs and the methods used by the robot community. This
extension, which we call backchannels, has been implemented
on the RETSINA MAS [7], which uses KQML. We present
the backchannel extension, detail the necessary supporting
network drivers, show significant analytical and experimental
performance improvements achieved with backchannels, and
relate the successes of this approach in a search and rescue
robot system.
II. TWO TIERED COMMUNICATION
The current approach to multi-agent communication is to
allow one channel of communication between agents and to
constrain communication to one language. This works well
for software agents communicating high level information
(such as commitments or negotiations) when efficiency is not
of paramount importance. Systems operating in a dynamic
physical environment need to send low level information (e.g.
telemetry or video data). These low level communications

(a) (b)
Fig. 1. Figure (a) shows the current MAS architecture. Figure (b) illustrates
how backchannels augment the current system.The backchannels do not
replace current lines of communication using the ACL, nor can they exist
between two agents not communicating at the ACL level.
often occur at high frequencies, which can clog the main line
of communication. We extend the current architecture to allow
multiple lines of communication between agents, as shown in
figure 1. The additional lines, or backchannels, are for the
transfer of low level information.
In order to preserve the functionality and elegance of the
ACL, all metainformation pertaining to the backchannels is
related at the ACL level. Accordingly, as shown in figure 1,
the backchannels are simplex, so that the sender, denoted as
the server, and receiver, or client, are always evident from ACL
level communication. The content of the messages sent over
a backchannel is likewise fixed and agreed upon at the ACL
level. As backchannels are a resource facilitating the transfer
of information, negotiations on the regulation of this resource,
namely the establishment of backchannels and the frequency
of communication, take place at the ACL level.
As explained above, the use of backchannels is not to
replace the current agent communication languages, which are
necessary for communication between heterogeneous agents,
but for the transfer of low level messages. The content and
meaning of the messages to be exchanged is specified by
referencing a user defined format description library. Each
entry in the library consists of details of how to parse one
message and a semantically meaningful description of the type
of format, for example, “video” or “teleoperation-imperatives.”
Some applications may use a translator agent to convert
messages into the agent communication language or another
human readable form for transparency. Since the efficiency of
the message format can have a large impact on performance, as
explained in the Analysis section, protocols should be carefully
designed.
The purpose of the agent communication language is to
facilitate communication between agents in a multi-agent
system. Extending the system architecture therefore necessi-
tates the augmentation of the language with communication
acts relating to this extension. Accordingly, the ACL must
support the establishment, flow control, and termination of
backchannels.
Communication Act Description
backchannel request :request <line-type>
:protocol <message-type>
:reference-number <N>
:server-name <name>
<implementation specifics>
accept request :accept <line-type>
:reference-number <N>
:server-name <name>
<implementation specifics>
decline request :decline <line-type>
:reference-number <N>
:server-name <name>
:reason <details>
connection status :connection <status>
:reference-number <N>
:server-name <name>
TABLE I
COMM UNICATI ON AC TS TO SUP PO RT E STAB LI SH MEN T OF BAC KC HANNE LS
A. Establishing a backchannel
The formation of a backchannel begins with one agent
desiring to send or receive low level information to or from
another agent. If the initiator wishes to be the sender, the
server, she requests a “client line” of the other agent. If the
initiator wishes to receive information, acting as client, she
requests a “server line” of the other agent. In either case, the
request should indicate the type of data to be transferred by
referencing the format description library. Additional technical
information relating to the establishment of the backchannel,
discussed in the Network Driver Details section and illustrated
in figure 2, accompanies this request. The communication acts
necessary for the formation of a backchannel are described in
table I.
These communication acts were designed for KQML but
can easily be adapted to other ACLs. Backchannels are
distinguished by a reference number, unique to the server.
All communication regarding a particular backchannel must
specify the server and reference number. The <line-type>
may be either server-line or client-line. The connection status,
<status>, of the backchannel connection may be requested,
accepted, connected, failed, declined, or terminated. Imple-
mentation specifics for TCP are described in the Network
Drivers section of this paper.
B. Flow control of backchannels
Backchannels are simply a means of facilitating the transfer
of information between agents. As information transfer is
a commodity that consumes system resources, negotiations
regarding the flow control of backchannels are necessary.
The subject of negotiation is well explained in many papers
on multi-agent systems [8], [9], and the details are not pre-
sented here. We examine the communication acts specific to
backchannels which must be supported by the ACL. It is
necessary to start and stem the flow of messages, regulate
the frequency of transmissions, repeat messages, confirm the
connection status of the backchannel, and inquire and respond
to the total number of transmissions sent. The communication

Communication Act Description
begin transfer/ :transmission <start/stop>
halt transfer :reference-number <N>
:server-name <name>
repeat messages :repeat <number of messages>
:reference-number <N>
:server-name <name>
request frequency :request <frequency>
:reference-number <N>
:server-name <name>
accept frequency :accept <frequency>
:reference-number <N>
:server-name <name>
deny frequency :deny <frequency>
:reference-number <N>
:server-name <name>
request total :request num-tranmissions
number of :reference-number <N>
transmissions :server-name <name>
report total :tell num-tranmissions <n>
number of :reference-number <N>
transmissions :server-name <name>
TABLE II
COMM UN IC ATI ON ACTS TO SUP PO RT CON TRO L OF BAC KC HAN NE LS
Communication Act Description
request termination :request termination
(Handshake method) :reference-number <N>
:server-name <name>
termination warning :termination-warning <Time>
(Warning method) :reference-number <N>
:server-name <name>
report termination :connection terminated
(All methods) :reference-number <N>
:server-name <name>
TABLE III
COMM UN IC ATI ON ACTS TO SUP PO RT TER MINATION OF BACK CHANN EL S
acts necessary to the flow control of backchannels is described
in table II.
C. Termination of backchannels
As either the server or the client may be the initiator of the
backchannel, so must the ability to end the connection over
a backchannel fall equally to both parties. We provide three
protocols for termination at various levels of social etiquette.
The support required of the ACL for each method is described
in table III. Consider again two agents, Agent 1 and Agent 2,
where Agent 1 wishes to terminate the connection.
In the most polite way to sever the line of communication,
the handshake method, Agent 1 sends a request to Agent 2
though the ACL to end the connection. Agent 2 closes the
TCP connection when ready and then sends a response in
ACL alerting Agent 1 that the connection has been closed.
The second protocol for ending communication across a
backchannel is more similar to the agent shaking her head
than shaking hands. In the warning method, Agent 1 sends
warnings in ACL that the line will be shut down. Warnings
are sent at 30 seconds and 5 seconds. During this time, Agent
2 has the opportunity to close the TCP connection on her side
and then notify Agent 1 that the connection has been closed.
At the end of the time, if Agent 2 has not terminated the
connection, Agent 1 terminates it and then sends a message
of notification to Agent 2.
The final protocol, the cold shoulder method, is far less
friendly than the other methods as data may be lost. Here,
either agent simply closes the TCP connection without notice.
A message in the ACL is then sent notifying the other agent
that the connection has been closed.
Independent of which protocol is chosen, we insist that a
message is always sent through the ACL when a connection
is closed. With this restriction, termination protocols are
consistent with the rule that all metacommunication be handled
at the ACL level so that the state of a connection be apparent
from the messages. An exception to this rule is the case when
neither agent intentionally terminates the backchannel but the
connection is severed due to a physical loss of communication
between the agents. If this occurs, the agents must recognize
that the connection was terminated from the TCP level, which
sends a warning when a connection is terminated. Our protocol
does not allow agents to reopen a closed backchannel for any
reason, so a new backchannel would need to be established if
the agents wish to reestablish backchannel communication.
III. NETWORK DRIVER DETAILS
Although backchannels, like agent communication lan-
guages, are independent of the transport protocol, their imple-
mentation naturally depends heavily on the transport protocol
used. This section provides sample implementation details in
order to demonstrate the interleaving of low level and ACL
level communication. The specific implementation presented
here is for the TCP low level transport protocol, the most
widely used protocol in real robot systems. The analysis and
experimental results also assume TCP, though for systems
where efficiency is of paramount importance, UDP may be
a better alternative.
The protocol for establishing a connection between a pair of
agents varies slightly depending on whether the initiator wants
to send or receive the information. To illustrate this distinction,
consider Agents 1 (the initiator) and 2 as shown in figure 2.
In the first case, Agent 1 wishes to send information to Agent
2. For example, Agent 1 may wish to control Agent 2 through
teleoperation and needs to send many commands. In this case,
Agent 1 acts as the server while Agent 2 is the client. In
the second case, Agent 1 wishes to receive information from
Agent 2. As an example of this relationship, Agent 1 may
want streaming video at a certain resolution from Agent 2.
Now Agent 1 is the client and Agent 2 is the server.
Since the first step in establishing a TCP connection is
for the server to open a passive line on a port, the server
must acquiesce to the agreement before any progress can
be made. The case in which the initiator is the server is
consequently the simplest (figure 2(a)). Agent 1, the server,
opens a port for connections and then sends a message to
Agent 2 through the ACL requesting permission to set up a line
to send information (from Agent 2’s perspective a client line).
Agent 1 also provides the necessary information for Agent 2

(a) Agent 1 → Agent 2 (b) Agent 1 ← Agent 2
Fig. 2. Flowchart of interleaved high and low level communication for establishment of a backchannel in the case where Agent 1 wants Agent 2 to be the
client (a) and where Agent 1 wants Agent 2 to be the server (b). Messages sent through the ACL are in boxes with rounded edges.
to connect to the available port as well as a reference number.
The reference number is a unique number on Agent 1’s side
referring to this particular channel for communication. Finally,
Agent 1 specifies what information will be sent over the line
with the format descriptor, which is a reference into a library
of format descriptions. Agent 2 either accepts the request and
opens a client connection over TCP, or declines, optionally
providing a reason. Once the connection has been established,
Agent 2 notifies Agent 1. The backchannel is now ready to be
used, controlled through communication between the agents
in the ACL.
The protocol for the case in which the initiator wishes to
receive information and act as the client differs only in the
logistics. For a complete description of the interactions of the
agents when the initiator is the client, refer to figure 2(b).
IV. ANALYSIS
There are several reasons to believe that backchannels
will improve system performance, but it is first necessary to
define our metrics. Two of the most important elements of
network performance are bandwidth and latency. Following
the lead of the networking community [11], this analysis
uses frequency, directly related to throughput, and latency
as metrics for evaluating the performance of a system. This
paper equates the bandwidth and throughput of the system
with the frequency of message exchanges though there are
some differences. Bandwidth is the transmission capacity of
the network, usually measured in bits per second. Throughput
is the measurement of real world data across the network and
can never be more than bandwidth, and is frequently less due
to network traffic. We use frequency to describe the number of
messages successfully transmitted in a given time, rather than
the number of bytes transmitted as throughput. Frequency is
important from the multi-agent system perspective because it is
0 200 400 600 800 1000 1200 1400 1600 1800
0
5
10
15
20
25
30
Useful message size in bytes
Maximum frequency (in KHz)
Effect of backchannel on maximum frequency on 802.11b wireless network
With backchannel
Without backchannel
Fig. 3. A theoretical analysis of the maximum frequency at which messages
can be sent over an 11 Mbps network assuming the same message content
with or without backchannels and ignoring TCP effects.
the number of messages sent between agents which determines
the maximum number of agents and the maximum rate at
which information can be exchanged in a network.
Network latency is the amount of time it takes for a packet
to travel from the source to the destination. We use latency
to describe the amount of time it takes for a message to
be sent from the source and be processed at the destination.
Latency is of interest in systems with real-time constraints.
Although bandwidth and latency are partially properties of a
given network (i.e. a network that uses phone lines has lower
bandwidth and higher latency than one that uses Ethernet
lines), they are also dependent on the size of the messages
transmitted over the network. A theoretical analysis the effect
of message size on both throughput and latency illuminates

Fig. 4. Modeled and measured TCP latencies for 403 transfers from the
University of Washington to the UC-Davis, used with permission [10].
the benefits of the more efficient system we propose.
For this analysis, consider a multi-agent system composed
of identical agents, each sending the same messages. The
bandwidth required for such a system would depend on the
number of agents, the frequency at which each agent is sending
its messages, and the size of each message.
Bandwidth = Number × Frequency × Message
consumed of Agents Size
When using the backchannel, the overhead of sending
messages can be significantly reduced. Consider the case of
teleoperating a robot with a joystick. An interface agent wishes
to send the left and right wheel velocities to the robot agent.
Using the system implemented for a urban search and rescue
multi-agent system [12], which uses KQML, the message has
the following format:
(tell
:sender Agent2
:receiver Agent1
:language default-language
:ontology default-ontology
:reply-with nob
:in-reply-to nob
:forward-to nob
:content
(:leftWheelVelocity 145
:rightWheelVelocity 152))
Alternatively, if the message were passed over the backchan-
nel with a format description stating that each message was
two characters long and the first and second characters were
to be interpreted as the left and right wheel velocities re-
spectively, each message would only be two bytes long, as
opposed to the 200 bytes required to send the same information
over KQML. On the other hand, setting up the backchannel
and controlling the backchannel through the ACL incurs some
overhead.
The efficiency of the format description is very important.
0 200 400 600 800 1000 1200 1400 1600 1800
0
5
10
15
20
25
30
Useful Message Size in Bytes
Frequency in KHz
Effect of backchannel on maximum frequency on 802.11b wireless network
Experimental results without backchannel
Experimental results with backchannel
Theoretical results without backchannel
Theoretical results with backchannel
Fig. 5. Measured and theoretical effect of backchannels on maximum
frequency
To remove this dependency, we assume that the same message
:content is sent over the backchannel as through the ACL
line and all overhead is due purely to non-content overhead.
We also ignore the fact that large messages are most likely
either media files or compressed, which means that they would
need to be encoded and thus enlarged in order to be transmitted
as ASCII text, incurring additional overhead (e.g. 20% using
UU-encoding). Finally, we ignore TCP level overhead in this
analysis.
Latency is studied by networks researchers because it affects
the quality of service of a network [10]. In a multi-agent
system, it is particularly important in real-time domains where
small changes in latency may mean the difference between
success and failure. The work of Cardwell et al., reproduced
with permission in figure 4, shows analytically and empirically
that TCP latency increases with message size. For example,
doubling the message size from 20000 to 40000 bytes results
in a nearly 75% increase in latency. Furthermore, the results
indicate an increased sensitivity of latency to message size
for smaller messages. This data suggests that more efficient
protocols may significantly decrease latency in a system. As
a caveat, however, the latency of a system depends on the
protocols and algorithms used. The Nagle algorithm [13] or
kernel buffers can cause small messages to be accumulated
and packaged together, increasing the latency.
V. EXPERIMENTAL RESULTS
We augmented the RETSINA multi-agent system, [7], to
support backchannels as discussed in Section 2. We then
conducted tests to determine the maximum frequency at which
messages could be interchanged between a pair of agents on
two different networks. The results (shown in figure 5) confirm
our claim that the use of backchannels can lead to significant
savings for small messages. The maximum frequencies ob-
served on a 11 Mbps network match the predicted results of
figure 3 very well.
0 100 200 300 400 500 600
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
Useful Message Size in Bytes
Average Latency in ms
Effect of backchannel on Latency
Without backchannel on wireless network
With backchannel on wireless network
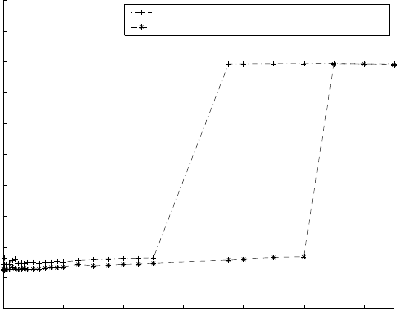
Fig. 6. Measured effect of backchannels on latency
Tests to determine how latency is affected by the addition
of a backchannel also match theoretical results. The tests
described do not measure only TCP latency because we timed
the round trip which includes time to parse the message.
The total savings in latency is an average of 20% on the
wireless network with our implementation, but can be as much
as 80% savings for messages in the 375 to 500 byte range, a
significant benefit for real-time systems.
VI. APPLICATION TO SEARCH AND RESCUE ROBOTICS
Urban Search and Rescue (USAR) involves coordination
between people, agents, and robots to explore a space with
many environmental challenges, including limited and spo-
radic communication. We have built a heterogeneous set of
wheeled differential drive robots, and several user interfaces
to allow robots to explore a mock up disaster site. In order
to enable robots, agents, and people to work together, we are
using the RETSINA multi-agent system architecture. Based on
empirical testing of our system, we found that the overhead of
KQML messages was very significant. Additionally, sending
real-time video to the human operators could only be done
at enormous cost through RETSINA and so was controlled
outside the architecture. After integrating backchannels into
the RETSINA architecture, we found that the stability and
reliability of the robot system improved significantly as latency
was decreased and throughput was increased.
VII. RELATED WORK
Discussion of the balance between efficiency and readability
is common in the networking community where HTML is
mixed with other formats using MIME headers to allow media
types other than simple ASCII text to be encoded into a
message. Much work has also been done to improve the speed
of transferring images and multimedia. This work [10], [11],
[14], [13] has contributed to the analysis on throughput and
is an excellent resource for more information on the effect
of message size on latency. To our knowledge, this is the first
attempt to integrate backchannels into a MAS in a formal way.
The MAS community has largely ignored the importance of
throughput efficiency. Work has been done to develop real-time
multi-agent systems, [15], [16], but this work has focused on
higher level algorithms, ignoring the low level protocol and
the potential benefits of improving throughput.
VIII. CONCLUSION
We have presented arguments that a single line and language
for agent communication is inadequate for systems that require
the transfer of multimedia files and low level data at high
frequencies. We describe a two-tiered communication archi-
tecture using backchannels and the steps necessary to integrate
backchannels into existing MAS architectures in a principled
way. We hope this flexibility will open up multi-agent systems
for use with physical agent systems, helping to bridge the
multi-agent multi-robot system research gap. Theoretical and
experimental tests show improved communication efficiency
and the addition of backchannels to the MAS RETSINA
enabled the use of RETSINA for an urban search and rescue
multi-robot system.
REFERENCES
[1] T. Finin, R. Fritzson, and R. McEntire, “KQML as an agent commu-
nication language,” in Proceedings of the 3rd International Conference
on Information and Knowledge Management, November 1994.
[2] (1997) Foundation for intelligent physical agents. [Online]. Available:
http://www.fipa.org
[3] K. Sycara, K. Decker, A. Pannu, M. Williamson, and D. Zeng, “Dis-
tributed intelligent agents,” IEEE Expert, December 1996.
[4] H. Chalupsky et al., “Electric elves: Agent technology for supporting
human organizations,” AI Magazine, Summer 2002.
[5] K. Decker, K. Sycara, and D. Zeng, “Designing a multi-agent portfolio
management system,” in Proceedings of the AAAI Workshop on Internet
Information Systems, 1996.
[6] O. Shehory, G. Sukthankar, and K. Sycara, “Agent aided aircraft
maintenance,” in Proceedings of Autonomous Agents ’99, May 1999,
pp. 306–312.
[7] K. Sycara, M. Paolucci, M. van Velsen, and J. Giampapa, “The
RETSINA MAS infrastructure,” special joint issue of Autonomous
Agents and MAS, vol. 7, no. 1 and 2, July 2003.
[8] C. Li, J. Giampapa, and K. Sycara, “A review of research literature on
bilateral negotiations,” Carnegie Mellon University, Robotics Institute,
Pittsburgh, PA, Tech. Rep. CMU-RI-TR-03-41, Nov. 2003.
[9] G. Zlotkin and J. Rosenschein, “Negotiation and task sharing among
autonomous agents in cooperative domains,” in Proceedings of the
Eleventh International Joint Conference on Artificial Intelligence, 1989,
pp. 912–917.
[10] N. Cardwell, S. Savage, and T. Anderson, “Modeling tcp latency,” in
Proceedings of IEEE INFOCOM, March 2000.
[11] M. Harchol-Balter. (2002, November) Quality of service lectures.
[Online]. Available: http://www-2.cs.cmu.edu/∼srini/15-441/F02/
[12] J. Wang, M. Lewis, and J. Gennari, “USAR: A game based simulation
for teleoperation,” in Proceedings of the 47th Annual Meeting of the
Human Factors and Ergonomics Society, Denver, CO, Oct. 13–17, 2003.
[13] J. Nagle, “Congestion control in IP/TCP internetworks,” Network Infor-
mation Center, SRI International, Menlo Park, CA, RFC 896, January
1984.
[14] J. F. Kurose and K. W. Ross, Computer Networking: A Top-Down
Approach Featuring the Internet. Addison-Wesley, July 2000, ch. 3.7
TCP Congestion Control.
[15] M. Allouche, O. Boisser, and C. Sayettat, “Temporal social reasoning
in dynamic multi-agent systems,” in Proceedings of the Fourth Inter-
national Conference on Multi-Agent Systems (ICMAS-2000). IEEE
Computer Society, 2000, pp. 23–28.
[16] V. Julian and V. Botti, “Developing real-time multi-agent systems,” in
Fourth Iberoamerican Workshop on Multi-Agent Systems, Iberagents
2002. IBERAMIA 2002, the VIII Iberoamerican Conference on
Artificial Intelligence, November 2002.
